
 テンセグリティ
という
面白い構造があって、
前から気にはなっていたが、真面目に構造的に捉えようとすると、
それなりに難しい。
テンセグリティーにも色んな種類があって、
部材が3次元的に複雑に交差しているようなものもあるが、
図のような2次元の最も単純なテンセグリティーに関しては、
(剛体の力学として、重心の位置やモーメントのつりあいなどを真面目に
計算している人とかもいるのだけど)、
なんかもう少し構造力学に毛の生えた程度の感じで、
もっと単純に本質を捉えられないかなあと思った。
テンセグリティ
という
面白い構造があって、
前から気にはなっていたが、真面目に構造的に捉えようとすると、
それなりに難しい。
テンセグリティーにも色んな種類があって、
部材が3次元的に複雑に交差しているようなものもあるが、
図のような2次元の最も単純なテンセグリティーに関しては、
(剛体の力学として、重心の位置やモーメントのつりあいなどを真面目に
計算している人とかもいるのだけど)、
なんかもう少し構造力学に毛の生えた程度の感じで、
もっと単純に本質を捉えられないかなあと思った。
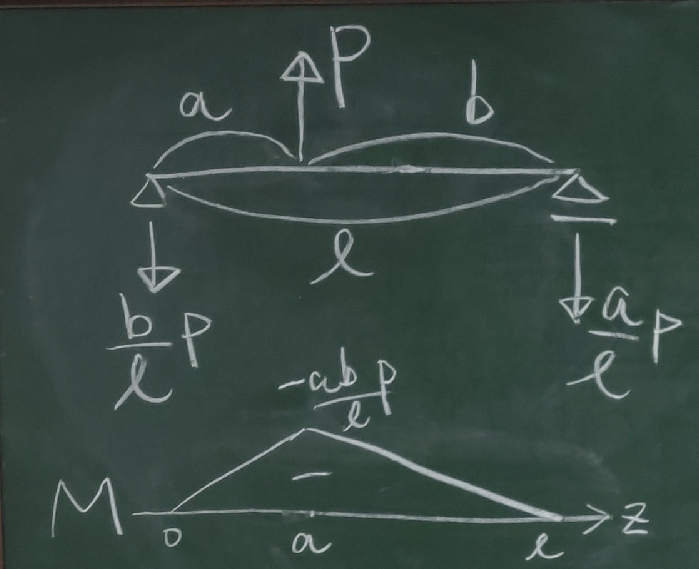 まず、単純梁の適当な箇所(長さ$\ell$を$a:b$に分割する点)を上に$P$で引っ張ってみる。
すると、
公式から、
左端には$\frac{b}{\ell}P$,
右端には$\frac{a}{\ell}P$の反力が下向きに生じる。
まず、単純梁の適当な箇所(長さ$\ell$を$a:b$に分割する点)を上に$P$で引っ張ってみる。
すると、
公式から、
左端には$\frac{b}{\ell}P$,
右端には$\frac{a}{\ell}P$の反力が下向きに生じる。
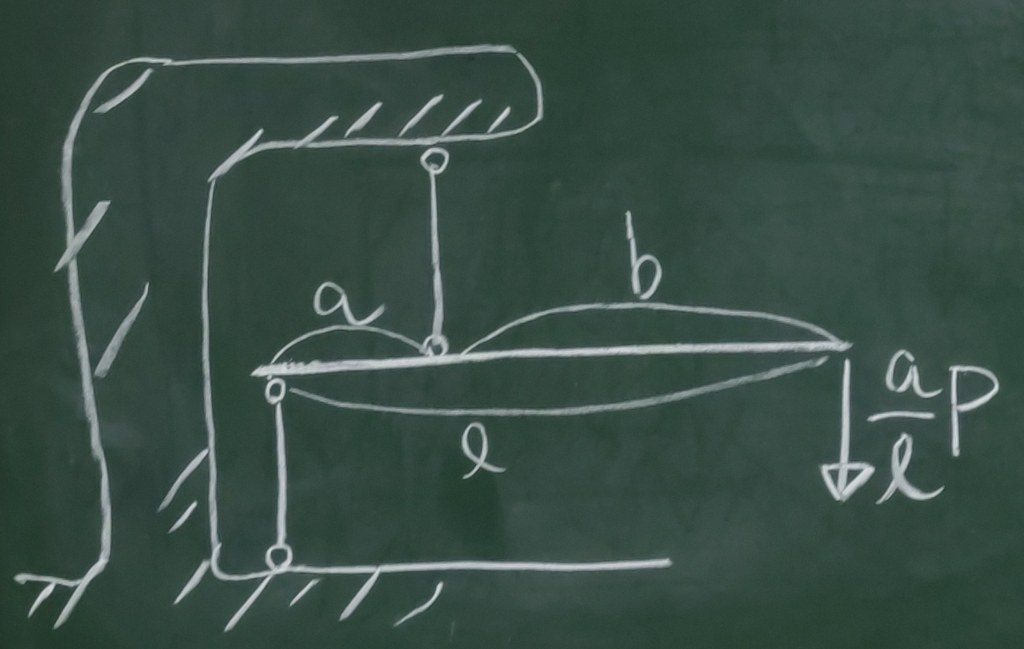 今、この梁の左端と載荷点($z=a$)を図のように、床と天井にトラス部材(またはひも)で
連結して、右端を$\frac{a}{\ell}P$で下に引っ張ると、
左端の部材には$\frac{b}{\ell}P$,
載荷点($z=a$)の部材には$P$の引張力が作用してつりあっている状態になる。
実構造物で自重のみが荷重となる場合、$a\lt b$としてやれば、梁が右回転しようとするモーメントと
2本の釣り部材の引張力が作る左回転のモーメントとがつりあう。
もし
$a\gt b$だと、左端の釣り部材に圧縮力が作用するので、部材がひもだと左回転してしまう。
今、この梁の左端と載荷点($z=a$)を図のように、床と天井にトラス部材(またはひも)で
連結して、右端を$\frac{a}{\ell}P$で下に引っ張ると、
左端の部材には$\frac{b}{\ell}P$,
載荷点($z=a$)の部材には$P$の引張力が作用してつりあっている状態になる。
実構造物で自重のみが荷重となる場合、$a\lt b$としてやれば、梁が右回転しようとするモーメントと
2本の釣り部材の引張力が作る左回転のモーメントとがつりあう。
もし
$a\gt b$だと、左端の釣り部材に圧縮力が作用するので、部材がひもだと左回転してしまう。
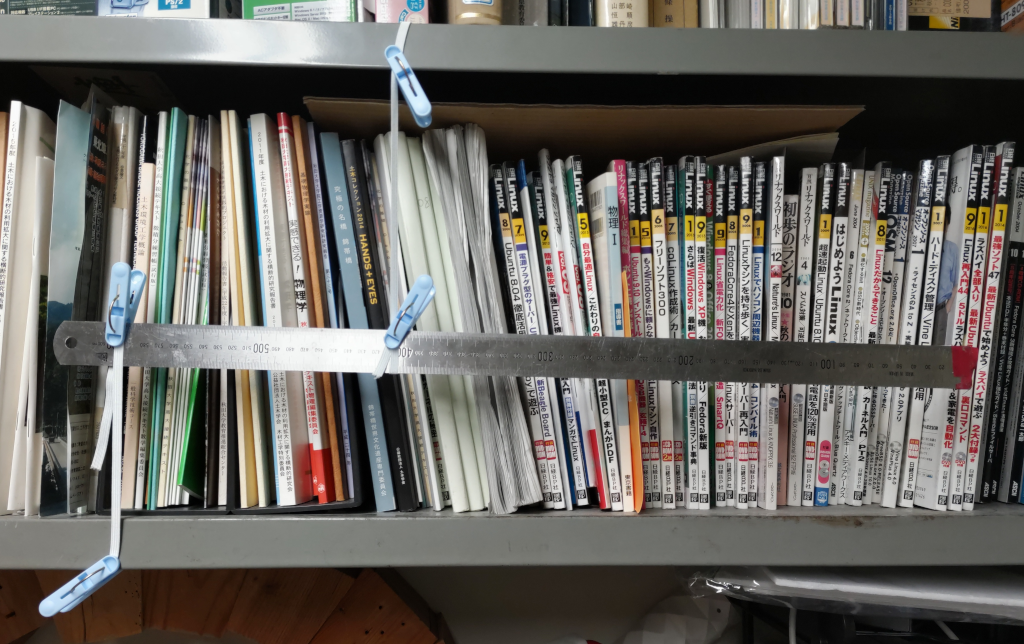 念のため、実構造物の写真。
念のため、実構造物の写真。
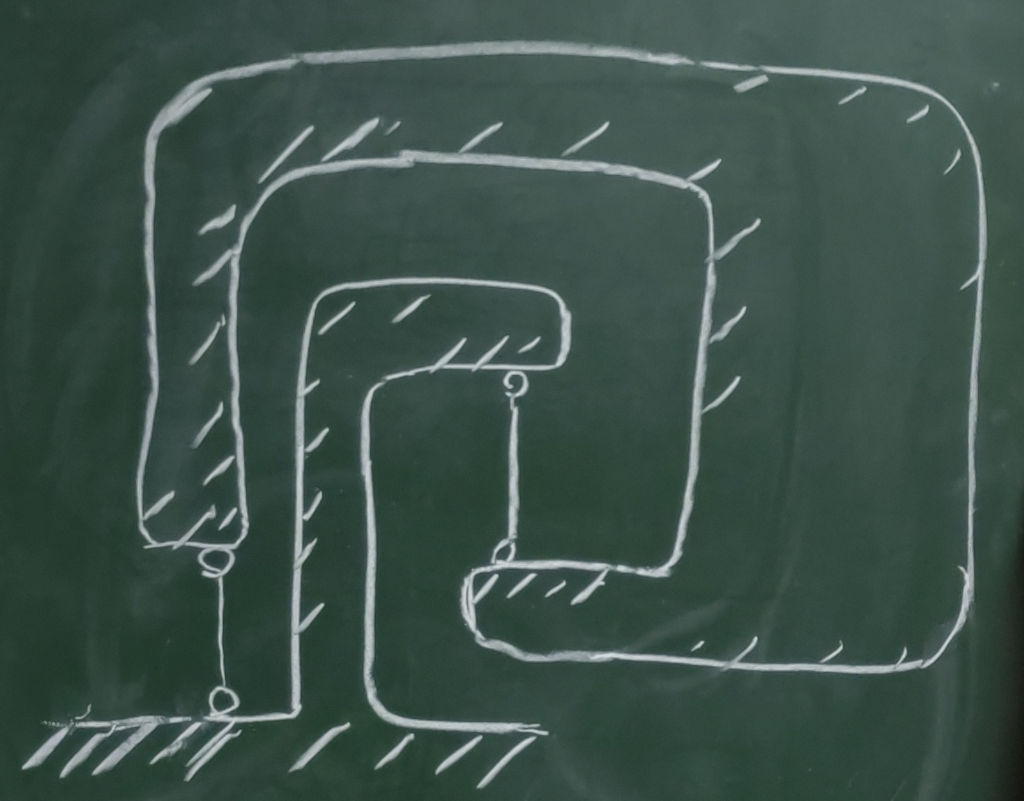
さて、この梁が2本の釣り部材と連結されているところをぐにゃっと伸ばして、
図のようにつないでやったら、
節点(連結部)に関しては同じつりあい状態で、テンセグリティと同じ構造を
作れるのではないだろうか。
もう梁の形はなくなったので、節点(連結点)間の距離$a$に対して
$\ell$だの$b$だのはどうでもいいのだが、
ぐにゃっと伸ばして上に覆いかぶさるように変形された曲がり梁が、
2箇所の節点(連結点)で回転は許された状態で、自重により
右回りのモーメント荷重を発生させるような形状(例えば十分に右側に張り出しているとか)で
あれば、
2本の釣り材に引張力が発生し、これらの引張力が作る左回りのモーメントと
つりあうということではないかと思う。
実際のテンセグリティの左側の釣り材の連結点は、もっと上の方にあって、
左側の釣り材の方が長くなっているものが一般的だが、
力のつりあいは特に変わらないと思う。
というように、今のところ捉えているが、もしなんか勘違いしてたら、
指摘してほしい。
 確認のため、覆いかぶさる曲がり梁を適当に作ってみたら、
左に回転しようとするモーメントが大きくて、左に回転して左側の釣り材がつぶれる。
確認のため、覆いかぶさる曲がり梁を適当に作ってみたら、
左に回転しようとするモーメントが大きくて、左に回転して左側の釣り材がつぶれる。
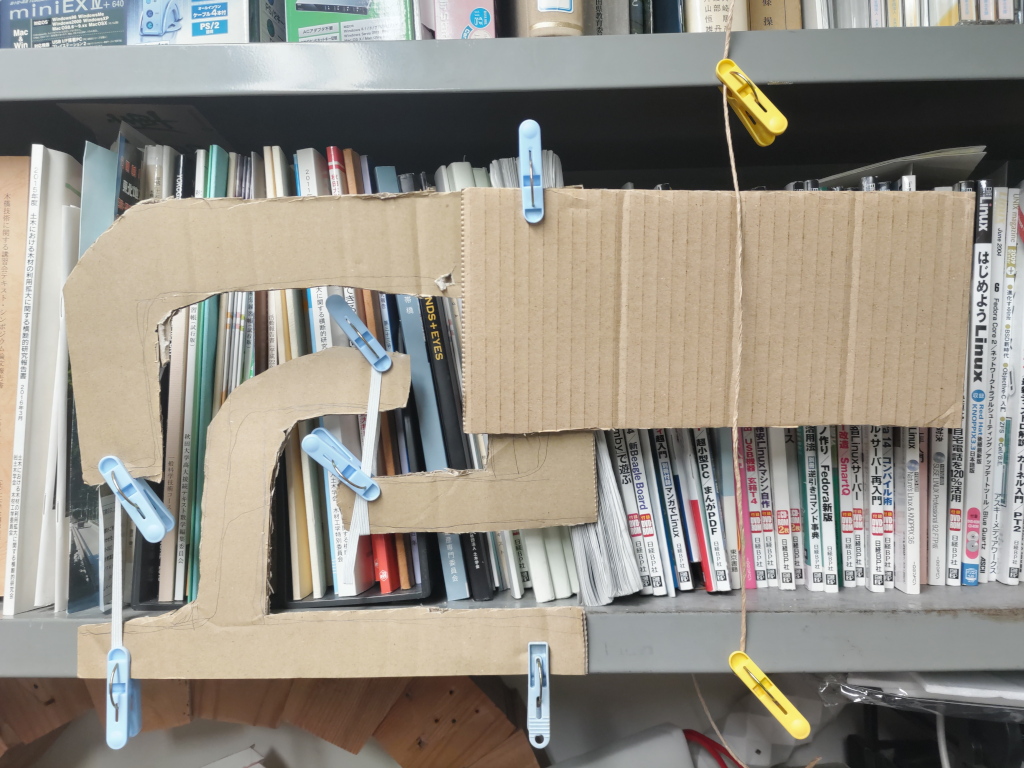 なので、右に回転しようとするモーメントが大きくなるように、右側におもりを追加したら、
2本の釣り材に引張力が作用して、これらの引張力が作る左回りのモーメントとつりあっている
ような感じにはなった。
右側の茶色いひもは、
部材が倒れるのを防止して
変位を2次元平面内に拘束するためのもの。
なので、右に回転しようとするモーメントが大きくなるように、右側におもりを追加したら、
2本の釣り材に引張力が作用して、これらの引張力が作る左回りのモーメントとつりあっている
ような感じにはなった。
右側の茶色いひもは、
部材が倒れるのを防止して
変位を2次元平面内に拘束するためのもの。
というわけで、テンセグリティーは、2点で支えられた片持ち梁(つまり張り出し梁)みたいなもの
ではないかなあと。
最近(2017年5月頃)、テレビで
虹橋が
レオナルドの橋やダビンチの橋として紹介されることが増えてきたので、一応メモしておく。
虹橋は、棒だけを使って自立できるようにアーチ状に組んだ橋で、
中国の古い時代(1000年前後)の絵
(清明上河図)に描かれているが、
それから500年後のレオナルド・ダ・ビンチのスケッチにも同じ構造の橋が
描かれている。
工藤 聖来、西野 大貴、陳 沛山:立体組合せパネル構造についての基礎研究
によると、
但し、虹橋の登場はダ・ヴィンチの発明より約500年早く、
イタリアにいたダ・ヴィンチは宋代虹橋から何かのヒントを
得たことがあったかについては継続的に研究する価値がある。
ということなので、
ダ・ビンチがたまたま同じ構造を思いついたのか、
虹橋の絵等を見る機会があったのか、確かに興味深い。
虹橋は、2cm角ぐらいの角材で作るとなかなか楽しめるので、
オープンキャンパスなどの教材としても利用できる
(作っている最中に部材どうしが滑って崩壊しやすいので、
バケツに水を汲んで、角材に水をつけながら作業すると、
組みやすい。でっかい方が楽しい)。
こちらの森林総合研究所の資料に図面があるが、
虹橋全体としてはアーチ形状ではあるものの、
(折れ線アーチのように
部材の軸圧縮で荷重に抵抗する構造ではなく)
それぞれの部材は3点で支持された3点曲げのような状態で、
マジックハンド構造にも近いかも。
 断面2次モーメントとか、
$x,y,z$座標系での積分は、比較的イメージしやすいと思うが、
極座標$r,\theta$系での積分は、
回転方向に足し算していくのに、
$rd\theta$みたいに$r$がつくのはどうしてかとか、
ややイメージしにくいかもしれない。
どういう微小領域をどっち方向に足し算しているのかを
ちゃんと図示すれば、割とイメージしやすいのではないかと思う。
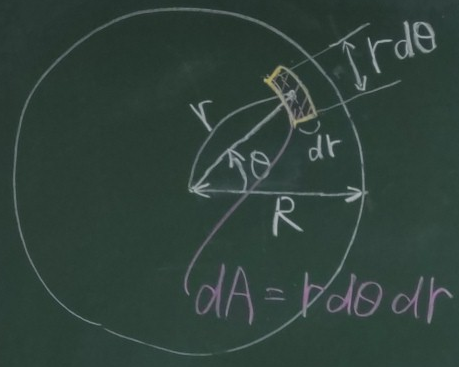
というわけで、一番 基本の円の面積を極座標系の積分で求めてみる。
点$(r,\theta)$上に図のようなバームクーヘン型の微小領域$dA$を
考える。円の面積は$dA$を全領域に面積積分したものだから、
断面2次モーメントとか、
$x,y,z$座標系での積分は、比較的イメージしやすいと思うが、
極座標$r,\theta$系での積分は、
回転方向に足し算していくのに、
$rd\theta$みたいに$r$がつくのはどうしてかとか、
ややイメージしにくいかもしれない。
どういう微小領域をどっち方向に足し算しているのかを
ちゃんと図示すれば、割とイメージしやすいのではないかと思う。
というわけで、一番 基本の円の面積を極座標系の積分で求めてみる。
点$(r,\theta)$上に図のようなバームクーヘン型の微小領域$dA$を
考える。円の面積は$dA$を全領域に面積積分したものだから、
${\displaystyle A=\int_{A}dA}$
と表せる。
バームクーヘン$dA$を長方形と見なせるとすると、
周方向の長さは$rd\theta$(となり、この長さを表すのに$r$をかける必要がある)、
半径方向の長さは$dr$だから、長方形の面積は、
$dA=rd\theta dr$
となる。これを
$\theta$については$0$から$2\pi$まで回転させながら、
$r$については$0$から$R$まで伸ばしながら、
微小バームクーヘンの面積を合計すればよい。よって、円の面積は
${\displaystyle
A=\int_{A}dA=\int_{0}^{R}\int_{0}^{2\pi}rd\theta dr}\\
{\displaystyle =\int_{0}^{2\pi}d\theta\int_{0}^{R}r dr
=2\pi\left[
\frac{r^{2}}{2}
\right]_{0}^{R}
=\pi R^{2}}
$
となる。
 断面2次モーメントというのは、例えば
断面の応力を面積積分して曲げモーメントを求めたりすると
出てくる量で
$\int_{A}y^{2}dA$みたいに定義され、
棒とか梁の曲がりにくさを表している。
一方、
慣性モーメントというのは、回転する物体の回転軸回りの運動エネルギーを求めると出てくる
量で、
$\int_{V}\rho r^{2}dV$みたいに定義され、物体の回転しにくさを表している。
これらは似ているけど、定義からも違うものなのだが、
英語では、どちらも moment of inertia と言うのでとても紛らわしい。
なので、日本語の慣性モーメントに相当する方は、mass moment of inertia と呼んで
区別したりするようだ。
断面2次モーメントというのは、例えば
断面の応力を面積積分して曲げモーメントを求めたりすると
出てくる量で
$\int_{A}y^{2}dA$みたいに定義され、
棒とか梁の曲がりにくさを表している。
一方、
慣性モーメントというのは、回転する物体の回転軸回りの運動エネルギーを求めると出てくる
量で、
$\int_{V}\rho r^{2}dV$みたいに定義され、物体の回転しにくさを表している。
これらは似ているけど、定義からも違うものなのだが、
英語では、どちらも moment of inertia と言うのでとても紛らわしい。
なので、日本語の慣性モーメントに相当する方は、mass moment of inertia と呼んで
区別したりするようだ。
回転する物体の運動エネルギーは、微小部分の質量が$\rho dV$で表されるから、
${\displaystyle
\int_{V}\frac{1}{2}\rho v^{2}dV=\int_{V}\frac{1}{2}\rho (r\omega)^{2}dV
=\frac{1}{2}I_{慣}\omega^{2}
}$
と表したときの$I_{慣}$が慣性モーメントで、次式で定義される。
$
{\displaystyle I_{慣}=\int_{V}\rho r^{2}dV}
$
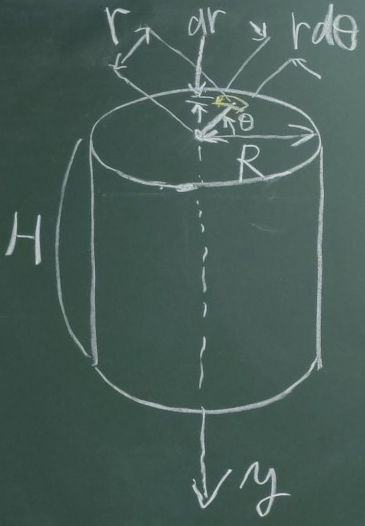
まず、円柱の軸回りの慣性モーメントを求めてみる。
$
{\displaystyle I_{円柱}=\int_{V}\rho r^{2}dV}
{\displaystyle =\rho\int_{0}^{H}\int_{0}^{R}\int_{0}^{2\pi} r^{2}r d\theta dr dy }\\
{\displaystyle =2\pi\rho H\int_{0}^{R}r^{3}dr}
{\displaystyle =2\pi\rho H\left[\frac{r^{4}}{4}\right]_{0}^{R}
=\frac{\pi\rho HR^{4}}{2}}\\
{\displaystyle
=\frac{\rho\pi R^{2}HR^{2}}{2}
=\frac{M_{円柱}R^{2}}{2}
\\
}
$
ただし、$M_{円柱}=\rho\pi R^{2}H$は円柱の質量。
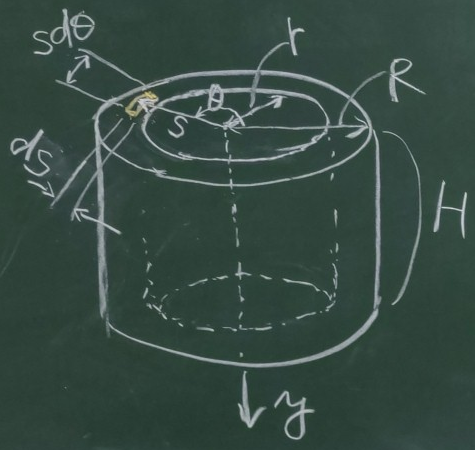 次に円管(中空円柱)。
外径を$R$, 内径を$r$とし、極座標は$(s,\theta)$で表す。
次に円管(中空円柱)。
外径を$R$, 内径を$r$とし、極座標は$(s,\theta)$で表す。
$
{\displaystyle I_{円管}=\int_{V}\rho s^{2}dV}
{\displaystyle =\rho\int_{0}^{H}\int_{r}^{R}\int_{0}^{2\pi} s^{2}s d\theta ds dy }\\
{\displaystyle =2\pi\rho H\int_{r}^{R}s^{3}ds}
{\displaystyle =2\pi\rho H\left[\frac{s^{4}}{4}\right]_{r}^{R}
=\frac{\pi\rho H(R^{4}-r^{4})}{2}}\\
{\displaystyle
=\frac{\rho\pi(R^{2}-r^{2})H(R^{2}+r^{2})}{2}
=\frac{M_{円管}(R^{2}+r^{2})}{2}
}
$
ただし、$M_{円管}=\rho(\pi R^{2}H-\pi r^{2}H)$は円管の質量。
さて、外径の同じ円柱だの円管だのを斜面を転がして、どっちが速いかみたいなクイズはよくあるけど、
密度が等しいのか、質量が等しいのかによって、
答えは変わってくるのではないだろうかと疑問になる。
円柱と円管の質量が等しいのであれば、
$\dfrac{MR^{2}}{2}\lt\dfrac{M(R^{2}+r^{2})}{2}$
となって、円柱の慣性モーメントの方が小さくなるから円柱の方が速く坂を転がると
言えるだろうが、円柱と円管の密度が等しい場合は
$\dfrac{\pi\rho HR^{4}}{2}\gt
\dfrac{\pi\rho H(R^{4}-r^{4})}{2}$
となり、円管の慣性モーメントの方が小さくなるから、
少なくとも、慣性モーメントの大小だけでは速く転がるかどうかを判断できないのではないか。
そのうち、確認するが、どうやら、
斜面を転がり落ちる加速度を計算すると(具体的に計算しているサイト等は後述)、
$a=\dfrac{g\sin\theta}{1+\frac{I_{慣}}{MR^{2}}}$
みたいになって、分母の
$\dfrac{I_{慣}}{MR^{2}}$の慣性モーメント$I_{慣}$の中に入っている質量$M$が約分されて、
$\dfrac{I_{慣}}{MR^{2}}$が質量$M$と外径$R$の2乗
(円管の場合は、内径$r$=外径$R$とみなした円管の慣性モーメント)で
無次元化された慣性モーメントになるから、
質量に関係なく、形状が慣性モーメントを小さくするような形の方が速く転がる
ということになるらしい。
そういうことであれば(構造屋の感覚?としては)、
このように無次元化した慣性モーメントを
無次元化慣性モーメント$=\dfrac{I_{慣}}{MR^{2}}$
として定義してしまえば、
(質量や密度を気にせずに回転しにくさを評価できて)便利なような気がするのだが、
「無次元化慣性モーメント」とか「比慣性モーメント」で検索してみても、
そういう感じのはちょっと出てこない。別の語句で定義されているのかも。
具体的に、円柱の$\dfrac{I_{慣}}{MR^{2}}$を計算すると、
$\dfrac{I_{円柱}}{M_{円柱}R^{2}}=\dfrac{\frac{M_{円柱}R^{2}}{2}}{M_{円柱}R^{2}}=\dfrac{1}{2}$
これを上の加速度$a$の式に代入すると、
$a_{円柱}=\dfrac{g\sin\theta}{1+\dfrac{1}{2}}=\dfrac{2}{3}g\sin\theta$
円管は、
$\dfrac{I_{円管}}{M_{円管}R^{2}}=\dfrac{\frac{M_{円管}(R^{2}+r^{2})}{2}}{M_{円管}R^{2}}=\dfrac{1+\frac{r^{2}}{R^{2}}}{2}$
$a_{円管}=\dfrac{g\sin\theta}{1+\dfrac{1+\frac{r^{2}}{R^{2}}}{2}}
=\dfrac{2g\sin\theta}{3+\frac{r^{2}}{R^{2}}}$
内径$r=$外径$R$の近似をすると$a_{円管}=\dfrac{1}{2}g\sin\theta$となる。
いずれ、
$a_{円柱}=\dfrac{2}{3}g\sin\theta$よりは小さいから、円管の方が遅いということになる。
内径$r=0$とすれば、$a_{円柱}=\dfrac{2}{3}g\sin\theta$に一致する。
ところで、上の加速度の式をちゃんと導くには、
角運動量からちゃんと計算しなければならないようだが、こういう物理一般の問題の
計算方法を網羅的に公開していて参考になるサイトとしては、
金沢工業大学の
KIT物理ナビゲーション
(「斜面を転がり落ちる剛体」の加速度の解説は、2024/12/16現在は「現在コンテンツ開発中」
ということなので、期待したい)
や
「長旅Pの物理メモ」
(角運動量のところに上記の加速度の計算が解説されている)が
あり、非常に参考になる。
とはいえ、
「長旅Pの物理メモ」は、
美少女キャラを登場させた
「性のモノ化」の
典型例ではあるので、
閲覧の際は注意。
(空中に浮かぶ)剛体に対する仮想仕事の原理と (床や壁に固定された)弾性体に対する仮想仕事の原理とは 区別する必要がある。 剛体については、つりあっている剛体を仮想的に変位させても仕事をしないので、 こちらや こちらで紹介されているように、 外力の仮想仕事の合計はゼロということでいいだろう。
一方、構造力学の梁といった(床や壁に固定された)弾性体の場合、 外力と反力はつりあっているものの、仮想変位を与えた場合、 支点は動かないので支点反力は仕事をせず、 外力のみが仕事をするから外力の仮想仕事はゼロにはならない。 つまり、外力は梁を弾性変形するのに仕事をしているのである。 だから、弾性体に対する仮想仕事の原理は、 外力の仮想仕事が内力の仮想仕事と等しいという以下のような式になる。
$$\int_{S}F_{k}\overline{u}_{k}dS=\int_{V}\sigma_{ij}\overline{\varepsilon}_{ij}dV$$
ついでに、補仮想仕事の原理は、
$$\int_{S} \overline{F}_{k}u_{k}dS=\int_{V}\overline{\sigma}_{ij}\varepsilon_{ij}dV$$
物体力は無視している
(厳密な式は構造力学公式集参照)。
$F_{k}$は表面力なので、表面積分している。
上の補仮想仕事の原理を天下り的に受け入れるとして、
実変位を知りたい点に実変位方向の仮想外力として単位荷重$\overline{1}$を
与えると、
左辺はこの単位荷重$\overline{1}$と単位荷重方向への実変位$\delta$との積となる。
$$\overline{1}\cdot\delta=\int_{V}\overline{\sigma}_{ij}\varepsilon_{ij}dV$$
初等梁で、軸力による軸方向応力
$\overline{\sigma}_{zz}^{軸力}=\frac{\overline{N}}{A}$と
曲げによる軸方向応力
$\overline{\sigma}_{zz}^{曲げ}=\frac{\overline{M}}{I}y$のみが作用し、
軸力による軸方向ひずみ$\varepsilon_{zz}^{軸力}$と
曲げによる軸方向ひずみ$\varepsilon_{zz}^{曲げ}$
の成分しかないものとすると、
$$=\int_{0}^{\ell}\int_{A}
(\overline{\sigma}_{zz}^{軸力}\varepsilon_{zz}^{軸力}
+
\overline{\sigma}_{zz}^{曲げ}\varepsilon_{zz}^{曲げ})
dAdz$$
$$=\int_{0}^{\ell}\int_{A}
(\frac{\overline{N}}{A}\varepsilon_{zz}^{軸力}+
\frac{\overline{M}}{I}y\varepsilon_{zz}^{曲げ})dAdz$$
$$=\int_{0}^{\ell}\int_{A}
(\frac{\overline{N}}{EA}E\varepsilon_{zz}^{軸力}+
\frac{\overline{M}}{EI}yE\varepsilon_{zz}^{曲げ})dAdz$$
$$=\int_{0}^{\ell}\int_{A}
(\frac{\overline{N}}{EA}E\varepsilon_{zz}^{軸力}+
\frac{\overline{M}}{EI}yE(-yv''))dAdz$$
$$=\int_{0}^{\ell}\int_{A}
(\frac{\overline{N}}{EA}\sigma_{zz}^{軸力}+
\frac{\overline{M}}{EI}(-Ey^{2}v''))dAdz$$
$$=\int_{0}^{\ell}
(\frac{\overline{N}}{EA}N+
\frac{\overline{M}}{EI}(-EIv''))dz$$
$$=\int_{0}^{\ell}
(\frac{\overline{N}N}{EA}+
\frac{\overline{M}M}{EI})dz$$
以下の変形の方が自然かも知れない
$$\int_{0}^{\ell}\int_{A}
(\overline{\sigma}_{zz}^{軸力}\varepsilon_{zz}^{軸力}
+
\overline{\sigma}_{zz}^{曲げ}\varepsilon_{zz}^{曲げ})
dAdz$$
$$=\int_{0}^{\ell}\int_{A}
(\frac{\overline{N}}{A}\varepsilon_{zz}^{軸力}+
\frac{\overline{M}}{I}y\varepsilon_{zz}^{曲げ})dAdz$$
$$=\int_{0}^{\ell}\int_{A}
(\frac{\overline{N}}{EA}E\varepsilon_{zz}^{軸力}+
\frac{\overline{M}}{EI}yE\varepsilon_{zz}^{曲げ})dAdz$$
$$=\int_{0}^{\ell}\int_{A}
(\frac{\overline{N}}{EA}\sigma_{zz}^{軸力}+
\frac{\overline{M}}{EI}y\sigma_{zz}^{曲げ})dAdz$$
$$=\int_{0}^{\ell}\int_{A}
(\frac{\overline{N}}{EA}\frac{N}{A}+
\frac{\overline{M}}{EI}\frac{M}{I}y^{2})dAdz$$
$$=\int_{0}^{\ell}
(\frac{\overline{N}}{EA}\frac{N}{A}A+
\frac{\overline{M}}{EI}\frac{M}{I}I)dz$$
$$=\int_{0}^{\ell}
(\frac{\overline{N}N}{EA}+
\frac{\overline{M}M}{EI})dz$$
半径$r\times$長さ$\ell$の細長い円柱を
引っ張ったら、半径が$\Delta r$縮んで、
長さが$\Delta\ell$のびたとする。
伸ばす前と後で体積が変化していないとすると、
$\pi r^{2}\ell=\pi(r-\Delta r)^{2}(\ell+\Delta\ell)$
以降、$\Delta$の2次項は無視する
$r^{2}\ell=(r^{2}-2r\Delta r)(\ell+\Delta\ell)$
$r^{2}\ell=r^{2}\ell-2r\ell\Delta r+ r^{2}\Delta\ell$
$2r\ell\Delta r=r^{2}\Delta\ell$
${\displaystyle
2\frac{\Delta r}{r}=
\frac{\Delta\ell}{\ell}
}$
${\displaystyle
\frac{
\frac{\Delta r}{r}
}
{\frac{\Delta\ell}{\ell}}
=\frac{1}{2}
}$
つまり、体積変化がない場合、ポアソン比は1/2.
半径$r\times$長さ$\ell$の細長い円柱を
引っ張ったら、半径が$\Delta r$縮んで、
長さが$\Delta\ell$のびたとする。
伸ばす前より後で体積が増えたとすると、
$\pi r^{2}\ell < \pi(r-\Delta r)^{2}(\ell+\Delta\ell)$
以降、$\Delta$の2次項は無視する
$r^{2}\ell < (r^{2}-2r\Delta r)(\ell+\Delta\ell)$
$r^{2}\ell < r^{2}\ell-2r\ell\Delta r+ r^{2}\Delta\ell$
$2r\ell\Delta r < r^{2}\Delta\ell$
${\displaystyle
2\frac{\Delta r}{r} <
\frac{\Delta\ell}{\ell}
}$
${\displaystyle
\frac{
\frac{\Delta r}{r}
}
{\frac{\Delta\ell}{\ell}}
< \frac{1}{2}
}$
つまり、引っ張って体積が増える場合、ポアソン比は1/2未満。
半径$r\times$長さ$\ell$の円柱を圧縮したら、半径が$\Delta r$膨れて、
長さが$\Delta\ell$縮んだとする。
圧縮する前より後で体積が減ったとすると、
$\pi r^{2}\ell > \pi(r+\Delta r)^{2}(\ell-\Delta\ell)$
以降、$\Delta$の2次項は無視する
$r^{2}\ell > (r^{2}+2r\Delta r)(\ell-\Delta\ell)$
$r^{2}\ell > r^{2}\ell+2r\ell\Delta r- r^{2}\Delta\ell$
$2r\ell\Delta r < r^{2}\Delta\ell$
${\displaystyle
2\frac{\Delta r}{r} <
\frac{\Delta\ell}{\ell}
}$
${\displaystyle
\frac{
\frac{\Delta r}{r}
}
{\frac{\Delta\ell}{\ell}}
< \frac{1}{2}
}$
つまり、圧縮して体積が減る場合も、ポアソン比は1/2未満。
直交異方性の直ひずみー直応力関係を表す行列の表記は
色んな流儀があるが、ここではまずは、
以下のように書いてみる。
$$\left(\begin{array}{c} \varepsilon_{x}\\ \varepsilon_{y}\\ \varepsilon_{z} \end{array} \right)= \left[ \begin{array}{ccc} \frac{1}{E_{x}}&-\frac{\nu_{xy}}{E_{x}}&-\frac{\nu_{xz}}{E_{x}}\\ -\frac{\nu_{yx}}{E_{y}}&\frac{1}{E_{y}}&-\frac{\nu_{yz}}{E_{y}}\\ -\frac{\nu_{zx}}{E_{z}}&-\frac{\nu_{zy}}{E_{z}}&\frac{1}{E_{z}} \end{array} \right] \left( \begin{array}{c} \sigma_{x}\\ \sigma_{y}\\ \sigma_{z}
\end{array} \right)\;\;\;\;\;\;\;\;(1)$$
対称性が成り立つなら、以下も同じこと(こっちが主流かも)
$$\left(\begin{array}{c} \varepsilon_{x}\\ \varepsilon_{y}\\ \varepsilon_{z} \end{array} \right)= \left[ \begin{array}{ccc} \frac{1}{E_{x}}&-\frac{\nu_{yx}}{E_{y}}&-\frac{\nu_{zx}}{E_{z}}\\ -\frac{\nu_{xy}}{E_{x}}&\frac{1}{E_{y}}&-\frac{\nu_{zy}}{E_{z}}\\ -\frac{\nu_{xz}}{E_{x}}&-\frac{\nu_{yz}}{E_{y}}&\frac{1}{E_{z}} \end{array} \right] \left( \begin{array}{c} \sigma_{x}\\ \sigma_{y}\\ \sigma_{z} \end{array} \right)
\;\;\;\;\;\;\;\;(2)$$
ポアソン比を3つだけで書くとすれば、
$$\left(\begin{array}{c} \varepsilon_{x}\\ \varepsilon_{y}\\ \varepsilon_{z} \end{array} \right)=
\left[ \begin{array}{ccc} \frac{1}{E_{x}}&-\frac{\nu_{xy}}{E_{x}}&-\frac{\nu_{xz}}{E_{x}}\\
-\frac{\nu_{xy}}{E_{x}}&\frac{1}{E_{y}}&-\frac{\nu_{yz}}{E_{y}}\\
-\frac{\nu_{xz}}{E_{x}}&-\frac{\nu_{yz}}{E_{y}}&\frac{1}{E_{z}} \end{array} \right] \left( \begin{array}{c} \sigma_{x}\\ \sigma_{y}\\ \sigma_{z} \end{array} \right)
\;\;\;\;\;\;\;\;(3)$$
せん断の関係も入れて$6\times 6$で書いた場合
$
\left(
\begin{array}{c}
\varepsilon_{xx}\\
\varepsilon_{yy}\\
\varepsilon_{zz}\\
\varepsilon_{xy}\\
\varepsilon_{yz}\\
\varepsilon_{zx}
\end{array}
\right)=
\left[
\begin{array}{cccccc}
\frac{1}{E_{x}}&-\frac{\nu_{xy}}{E_{x}}&-\frac{\nu_{xz}}{E_{x}}
&0&0&0\\
-\frac{\nu_{yx}}{E_{y}}&\frac{1}{E_{y}}&-\frac{\nu_{yz}}{E_{y}}
&0&0&0\\
-\frac{\nu_{zx}}{E_{z}}&-\frac{\nu_{zy}}{E_{z}}&\frac{1}{E_{z}}
&0&0&0\\
0&0&0&\frac{1}{2G_{xy}}&0&0\\
0&0&0&0&\frac{1}{2G_{xz}}&0\\
0&0&0&0&0&\frac{1}{2G_{yz}}
\end{array}
\right]
\left(
\begin{array}{c}
\sigma_{xx}\\
\sigma_{yy}\\
\sigma_{zz}\\
\sigma_{xy}\\
\sigma_{yz}\\
\sigma_{zx}
\end{array}
\right)
$
工学せん断ひずみを使う場合は、
ここ参照。
$\sigma_{y}=\sigma_{z}=0$とみなせるので、これを上の(1)式に代入して整理すると、
$$\sigma_{x}=E_{x}\varepsilon_{x}$$
$$\nu_{yx}=-\frac{E_{y}\varepsilon_{y}}{E_{x}\varepsilon_{x}}
,\; \;\;
\nu_{zx}=-\frac{E_{z}\varepsilon_{z}}{E_{x}\varepsilon_{x}}$$
$\sigma_{y}=\sigma_{z}=0$を上の(2)式に代入して整理すると、
$$\nu_{xy}=-\frac{\varepsilon_{y}}{\varepsilon_{x}},\;\;
\; \nu_{xz}=-\frac{\varepsilon_{z}}{\varepsilon_{x}}$$
$\sigma_{x}=\sigma_{z}=0$とみなせるので、これを上の(1)式に代入して整理すると、
$$\sigma_{y}=E_{y}\varepsilon_{y}$$
$$
\nu_{xy}=-\frac{E_{x}\varepsilon_{x}}{E_{y}\varepsilon_{y}},
\; \;\;
\nu_{zy}=-\frac{E_{z}\varepsilon_{z}}{E_{y}\varepsilon_{y}}
$$
$\sigma_{x}=\sigma_{z}=0$を上の(2)式に代入して整理すると、
$$
\nu_{yx}=-\frac{\varepsilon_{x}}{\varepsilon_{y}}
\; \;\;
\nu_{yz}=-\frac{\varepsilon_{z}}{\varepsilon_{y}}
$$
$$\sigma_{z}=E_{z}\varepsilon_{z}$$
$\sigma_{x}=\sigma_{y}=0$とみなせるので、これを上の(1)式に代入して整理すると、
$$
\nu_{xz}=-\frac{E_{x}\varepsilon_{x}}{E_{z}\varepsilon_{z}},
\; \;\;
\nu_{yz}=-\frac{E_{y}\varepsilon_{y}}{E_{z}\varepsilon_{z}}
$$
$\sigma_{x}=\sigma_{y}=0$を上の(2)式に代入して整理すると、
$$
\nu_{zx}=-\frac{\varepsilon_{x}}{\varepsilon_{z}}
\; \;\;
\nu_{zy}=-\frac{\varepsilon_{y}}{\varepsilon_{z}}
$$
MARC/Mentatなど、ポアソン比を3つ与える有限要素ツールは多いし、
上のポアソン比が3つの式を眺める限り、3つのポアソン比を適当に
与えれば、対称行列を設定してもらえるから問題なさそうに思えるが、
与えた3つのポアソン比から、残りの3つのポアソン比を計算したときに、
0.5(更には1)を超えるようなおかしな値にならないように調整する必要はある。
と2024年頃までは思い込んでいたが、直交異方性材料の場合、
上記の対称条件を満たす必要はあるものの、ポアソン比が0.5を超えることが等方性材料の
ようにおかしな物理的現象(圧縮してるのに体積が増えるとか)と特に対応しているわけではない
ので、0.5を超えないように調整しなくてもいいかもしれない。
例えば、木材モデルでよくやられるように、$E_{x}=E_{y}=\frac{E_{z}}{25}$と
与えてみる。すると、第一式は、
$$\left(\begin{array}{c} \varepsilon_{x}\\ \varepsilon_{y}\\ \varepsilon_{z} \end{array} \right)=
\left[ \begin{array}{ccc}
\frac{25}{E_{z}}&-\frac{25\nu_{xy}}{E_{z}}&-\frac{25\nu_{xz}}{E_{z}}\\
-\frac{25\nu_{yx}}{E_{z}}&\frac{25}{E_{z}}&-\frac{25\nu_{yz}}{E_{z}}\\
-\frac{\nu_{zx}}{E_{z}}&-\frac{\nu_{zy}}{E_{z}}&\frac{1}{E_{z}} \end{array} \right] \left( \begin{array}{c} \sigma_{x}\\ \sigma_{y}\\ \sigma_{z} \end{array} \right)$$
となる。すると、
$$\nu_{yx}=\nu_{xy},\; \nu_{zx}=25\nu_{xz},\; \nu_{zy}=25\nu_{yz}$$
となる。つまり、$\nu_{xy}, \nu_{xz}, \nu_{yz}$の3つの
ポアソン比を適当にFEMツールに与えるにしても、
(すべてを0.4とかと安直に与えて)
$\nu_{zx}$や$\nu_{zy}$が0.5を超えたりすることのないように、
例えば、
$$\nu_{xy}=\nu_{xz}=\nu_{yx}=\nu_{yz}=0.016$$
$$\nu_{zx}=\nu_{zy}=0.4$$
みたいに与えたりする。
(Salome-Mecaの直交異方性材料のLTN座標系の場合、
$\nu_{LT}(=\nu_{xy}), \nu_{LN}(=\nu_{xz}), \nu_{TN}(=\nu_{yz})$の3つを
与えることになっているので、$E_{N}(=E_{zz})=繊維方向ヤング率,
E_{L}(=E_{xx})=E_{T}(=E_{yy})=E_{N}/25$とした場合は、
$\nu_{LT}=\nu_{LN}=\nu_{TN}=0.016$を与えれば、
$\nu_{TL}=0.016, \nu_{NL}=\nu_{NT}=0.4$が自動的に計算されるという
ことだと思う、たぶん。)
だから有限要素ツールで与える3つのポアソン比が、
$\nu_{xy}, \nu_{xz}, \nu_{yz}$なのか、
$\nu_{yx}, \nu_{zx}, \nu_{zy}$なのか、
あるいはそれ以外の組み合わせなのかというのはとても重要である。
MARC/Mentatのnu12, nu23, nu31の3つがどれに対応するのか私は
現時点では確認していない。
座標方向に細長く横たわる棒の引張試験を有限要素解析してみて、
縦横のひずみの比から求まるポアソン比が、自分が与えているポアソン比と
近いかどうか検証しておいた方が安全だろう。
そういう意味では、CalculiXみたいに、
(ひずみ-応力行列ではなく)応力-ひずみ行列の方の成分を
(自分で計算して)与えなければならないツールの方が、めんどうではあるが、
自分の想定した通りのポアソン比の組み合わせが使われるという意味で
安全かも知れない。
今、$x$方向のひずみを無視できる平面ひずみ状態を考えると、
$\varepsilon_{xx}=\varepsilon_{xy}=\varepsilon_{zx}=0$となるから、
$0$でないひずみ成分は、
$\varepsilon_{yy}$, $\varepsilon_{yz}$, $\varepsilon_{zz}$となる。
これらを$x$軸右ねじまわりに$\theta$回転した$YZ$座標系における
$\varepsilon_{YY}$, $\varepsilon_{YZ}$, $\varepsilon_{ZZ}$は、ひずみテンソルの座標変換から、
以下のように表せる。
$
\left(
\begin{array}{cc}
\varepsilon_{YY} & \varepsilon_{YZ} \\
\varepsilon_{YZ} & \varepsilon_{ZZ}
\end{array}
\right)
=
\left(
\begin{array}{cc}
\cos\theta & \sin\theta \\
-\sin\theta & \cos\theta
\end{array}
\right)
\left(
\begin{array}{cc}
\varepsilon_{yy} & \varepsilon_{yz} \\
\varepsilon_{yz} & \varepsilon_{zz}
\end{array}
\right)
\left(
\begin{array}{cc}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta
\end{array}
\right)
$
これを計算すると、
$
\left(
\begin{array}{cc}
\varepsilon_{YY} & \varepsilon_{YZ} \\
\varepsilon_{YZ} & \varepsilon_{ZZ}
\end{array}
\right)
=
\left(
\begin{array}{cc}
\varepsilon_{yy}\cos^{2}\theta+\varepsilon_{yz}\sin2\theta+\varepsilon_{zz}\sin^{2}\theta
& \varepsilon_{yz}\cos2\theta-\frac{1}{2}(\varepsilon_{yy}-\varepsilon_{zz})\sin2\theta \\
\varepsilon_{yz}\cos2\theta-\frac{1}{2}(\varepsilon_{yy}-\varepsilon_{zz})\sin2\theta
&
\varepsilon_{yy}\sin^{2}\theta-\varepsilon_{yz}\sin2\theta+\varepsilon_{zz}\cos^{2}\theta
\end{array}
\right)
$
 今、水平に置かれた梁の軸方向に$z$軸、
鉛直下方向に$y$軸を取り、梁の側面にロゼットゲージを貼るとする。
直角2方向のゲージは、$y, z$方向に向けると、
$y$方向のゲージの直ひずみは$\varepsilon_{yy}$,
$z$方向のゲージの直ひずみは$\varepsilon_{zz}$ということになる。
斜め方向のゲージは、/方向と\方向の2方向があり得るが、
\方向に向けて貼ると、これは
$y$軸から
$x$軸右ねじ回りに$45^{\circ}$回転した方向だから、
\方向のゲージの直ひずみは、$\theta=45^{\circ}$のときの
$\varepsilon_{YY}$ということになる。
今、水平に置かれた梁の軸方向に$z$軸、
鉛直下方向に$y$軸を取り、梁の側面にロゼットゲージを貼るとする。
直角2方向のゲージは、$y, z$方向に向けると、
$y$方向のゲージの直ひずみは$\varepsilon_{yy}$,
$z$方向のゲージの直ひずみは$\varepsilon_{zz}$ということになる。
斜め方向のゲージは、/方向と\方向の2方向があり得るが、
\方向に向けて貼ると、これは
$y$軸から
$x$軸右ねじ回りに$45^{\circ}$回転した方向だから、
\方向のゲージの直ひずみは、$\theta=45^{\circ}$のときの
$\varepsilon_{YY}$ということになる。
$
\varepsilon_{YY}
=\varepsilon_{yy}\cos^{2}\theta+\varepsilon_{yz}\sin2\theta+\varepsilon_{zz}\sin^{2}\theta
$
だから、$\theta=45^{\circ}$を代入すると、
$
\varepsilon_{YY}
=\varepsilon_{yy}\cos^{2}45^{\circ}+\varepsilon_{yz}\sin90^{\circ}+\varepsilon_{zz}\sin^{2}45^{\circ}\\
=\varepsilon_{yz}+\frac{1}{2}(\varepsilon_{yy}+\varepsilon_{zz})
$
$\varepsilon_{yz}$について解けば、
$\varepsilon_{yz}=
\varepsilon_{YY}-\frac{1}{2}(\varepsilon_{yy}+\varepsilon_{zz})
$
つまり、梁の側面のせん断ひずみ$\varepsilon_{yz}$を求めるには、上の式の
$\varepsilon_{YY}$に\方向の直ひずみ、$\varepsilon_{yy}$に鉛直方向の直ひずみ、
$\varepsilon_{zz}$に水平方向の直ひずみの値を代入すればよい
(参考資料、
鬆徒労苦衷有迷禍荷苦痛)。
わかりやすく書けば、
$\varepsilon_{yz}=
\varepsilon_{斜め}-\frac{1}{2}(\varepsilon_{縦}+\varepsilon_{横})
$
ちなみに、/の向きに貼ってしまった場合、$\theta=-45^{\circ}$という
ことになるから
$
\varepsilon_{YY}
=\varepsilon_{yy}\cos^{2}(-45^{\circ})+\varepsilon_{yz}\sin(-90^{\circ})+\varepsilon_{zz}\sin^{2}(-45^{\circ})\\
=-\varepsilon_{yz}+\frac{1}{2}(\varepsilon_{yy}+\varepsilon_{zz})
$
となり、
$\varepsilon_{yz}=
-\varepsilon_{YY}+\frac{1}{2}(\varepsilon_{yy}+\varepsilon_{zz})
$
つまり、\と/では、$+$と$-$が逆になる。
\の向きに貼った場合:$\varepsilon_{yz}=
\varepsilon_{斜め}-\frac{1}{2}(\varepsilon_{縦}+\varepsilon_{横})$
/の向きに貼った場合:$\varepsilon_{yz}=
-\varepsilon_{斜め}+\frac{1}{2}(\varepsilon_{縦}+\varepsilon_{横})$
なお、工学せん断ひずみ
$\gamma_{yz}$は、$\gamma_{yz}=2\varepsilon_{yz}$である。
ASTMの繊維材料の試験方法(D3518(2018))に、
材料の繊維方向を引張試験体の引張方向から45°傾けた試験体を引っ張ることで
せん断弾性係数を測定する方法が書かれている。
実際には、複数段階の荷重ステップにおける増分どうしの関係で評価する方法が
説明されているのだが、
その辺をごまかして話を簡単にすると、以下のようなやり方だ。
引張荷重を$P$, 引張試験体の断面積を$A$とすると、
せん断応力$\tau$は、
$\tau=\frac{P}{2A}$
で表され、工学せん断ひずみ$\gamma$は、
$\gamma=\varepsilon_{縦}-\varepsilon_{横}$
で表されて、せん断弾性係数$G$は、
$G=\frac{\tau}{\gamma}$
で与えられるということになっている。
どうして、$\tau$や$\gamma$がそんな簡単な式で表されて、
せん断弾性係数が求められるのか、ちゃんと考えてみたい。
引張試験体の引張方向を$z$, 幅方向を$y$, 厚さ方向を$x$とする$xyz$座標系と
$z$軸から$x$軸右ねじ回りに$\theta$回転した$XYZ$座標系を考える。
$x$方向の応力を無視した平面応力状態を考えると、
$\sigma_{xx}=\sigma_{xy}=\sigma_{zx}=0$となるから、
$0$でない応力成分は、
$\sigma_{yy}$, $\sigma_{yz}$, $\sigma_{zz}$となる。
これらを$x$軸右ねじまわりに$\theta$回転した$YZ$座標系における
$\sigma_{YY}$, $\sigma_{YZ}$, $\sigma_{ZZ}$は、応力テンソルの座標変換から、
以下のように表せる。
$
\left(
\begin{array}{cc}
\sigma_{YY} & \sigma_{YZ} \\
\sigma_{YZ} & \sigma_{ZZ}
\end{array}
\right)
=
\left(
\begin{array}{cc}
\cos\theta & \sin\theta \\
-\sin\theta & \cos\theta
\end{array}
\right)
\left(
\begin{array}{cc}
\sigma_{yy} & \sigma_{yz} \\
\sigma_{yz} & \sigma_{zz}
\end{array}
\right)
\left(
\begin{array}{cc}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta
\end{array}
\right)
$
これを計算すると、
$
\left(
\begin{array}{cc}
\sigma_{YY} & \sigma_{YZ} \\
\sigma_{YZ} & \sigma_{ZZ}
\end{array}
\right)
=
\left(
\begin{array}{cc}
\sigma_{yy}\cos^{2}\theta+\sigma_{yz}\sin2\theta+\sigma_{zz}\sin^{2}\theta
& \sigma_{yz}\cos2\theta-\frac{1}{2}(\sigma_{yy}-\sigma_{zz})\sin2\theta \\
\sigma_{yz}\cos2\theta-\frac{1}{2}(\sigma_{yy}-\sigma_{zz})\sin2\theta
&
\sigma_{yy}\sin^{2}\theta-\sigma_{yz}\sin2\theta+\sigma_{zz}\cos^{2}\theta
\end{array}
\right)
$
さて、$z$方向に引っ張る引張試験では、一軸状態で$\sigma_{zz}$のみが卓越し、
$\sigma_{yy}=\sigma_{yz}=0$と見なせるから、
$\sigma_{YZ}=\frac{1}{2}\sigma_{zz}\sin 2\theta$
となる。$\theta=45^{\circ}$の場合は、
$\sigma_{YZ}=\frac{\sigma_{zz}}{2}$
となる。一軸状態の引張試験体では、$\sigma_{zz}=\frac{P}{A}$だから、
$\sigma_{YZ}=\frac{P}{2A}$
となる。
次にひずみの方を考える。$yz$面のせん断変形に対応するせん断弾性係数を$G_{yz}$とすると、
直交異方性材料では、
$\sigma_{yz}=2G_{yz}\varepsilon_{yz}$の関係があるが、
今、一軸状態で$\sigma_{yz}=0$とみなしているので、
$\varepsilon_{yz}=0$とみなせる。そうすると、
ひずみテンソルの座標変換から、
以下のように表せる。
$
\left(
\begin{array}{cc}
\varepsilon_{YY} & \varepsilon_{YZ} \\
\varepsilon_{YZ} & \varepsilon_{ZZ}
\end{array}
\right)
=
\left(
\begin{array}{cc}
\cos\theta & \sin\theta \\
-\sin\theta & \cos\theta
\end{array}
\right)
\left(
\begin{array}{cc}
\varepsilon_{yy} & 0 \\
0 & \varepsilon_{zz}
\end{array}
\right)
\left(
\begin{array}{cc}
\cos\theta & -\sin\theta \\
\sin\theta & \cos\theta
\end{array}
\right)
$
これを計算すると、
$
\left(
\begin{array}{cc}
\varepsilon_{YY} & \varepsilon_{YZ} \\
\varepsilon_{YZ} & \varepsilon_{ZZ}
\end{array}
\right)
=
\left(
\begin{array}{cc}
\varepsilon_{yy}\cos^{2}\theta+\varepsilon_{zz}\sin^{2}\theta
& -\frac{1}{2}(\varepsilon_{yy}-\varepsilon_{zz})\sin2\theta \\
-\frac{1}{2}(\varepsilon_{yy}-\varepsilon_{zz})\sin2\theta
&
\varepsilon_{yy}\sin^{2}\theta+\varepsilon_{zz}\cos^{2}\theta
\end{array}
\right)
$
よって、
$\varepsilon_{YZ} =-\frac{1}{2}(\varepsilon_{yy}-\varepsilon_{zz})\sin2\theta $
となる。$\theta=45^{\circ}$の場合は、
$\varepsilon_{YZ} =\frac{\varepsilon_{zz}-\varepsilon_{yy}}{2}$
ということになる。
工学せん断ひずみ$\gamma_{YZ}=2\varepsilon_{YZ}$だから、
$\gamma_{YZ} =\varepsilon_{zz}-\varepsilon_{yy}$
直交異方性材料では$\sigma_{YZ}=2G_{YZ}\varepsilon_{YZ}$つまり
$\sigma_{YZ}=G_{YZ}\gamma_{YZ}$の関係があるので、
$YZ$面のせん断変形に対応するせん断弾性係数は、
$G_{YZ}=\frac{\sigma_{YZ}}{\gamma_{YZ}}$
で与えられる。
つまり、$\sigma_{YZ}$を$\frac{P}{2A}$で求めて、
$\gamma_{YZ}$を$\varepsilon_{縦}-\varepsilon_{横}$で求めて、割り算すればよい。
おまけ。等方性だったら?
材料が等方性材料だとすると、
$G=\frac{\sigma_{zz}}{\gamma}=\frac{P}{2A(\varepsilon_{zz}-\varepsilon_{yy})}$
でせん断弾性係数が求められることになる。
構造実験では、縦ひずみ$\varepsilon_{zz}$と
横ひずみ$\varepsilon_{yy}$の比から
$\nu=-\frac{\varepsilon_{yy}}{\varepsilon_{zz}}$
としてポアソン比を求めるが、
$\varepsilon_{yy}=-\nu\varepsilon_{zz}$
を上の式に代入すると、
$G=\frac{P}{2A(\varepsilon_{zz}+\nu\varepsilon_{yy})}
=\frac{P}{2A\varepsilon_{zz}(1+\nu)}
=\frac{\sigma_{zz}}{2\varepsilon_{zz}(1+\nu)}
=\frac{E}{2(1+\nu)}
$
ということで、等方性材料のせん断弾性係数を求める公式
$G=\frac{E}{2(1+\nu)}$
が導かれた。おお。
梁の剛性マトリクスを数学的にちゃんと導くには、 仮想仕事式などを使って重みつき残差法として導かなければならないし、 それが有限要素法の基本だろう。 とはいえ、 剛性マトリクスを使って(プログラムを組んで)骨組みを解けるように なってもらうことが目的の授業で、 仮想仕事式を部分積分して変位関数を仮定してといった数学的な導出を やっていたのでは、なかなか大変なので、 マトリクス構造解析などの授業では、 天下り的に梁の剛性マトリクスはこういうふうに与えられるんですよで 済ましてしまうことも多いだろう。 そこをもう少し、梁のたわみを求められる範囲の知識の人でも、 なんとなく納得できるような導出をしてみたい。
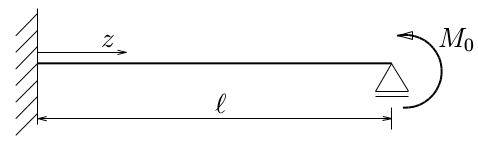
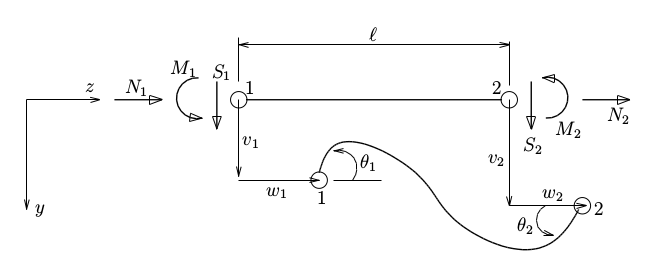 梁軸を$z$, たわみ方向を$y$とする
($x, y$の2方向のたわみは対等で、$z$軸が特殊なので、
この座標が私の好み)。
よって、$\theta_{1}, \theta_{2}$は、
$x$軸回りの右ねじ回転角になる。
たわみ角$v'(z)$は、$z$が+方向に増加したときに$v$が+方向に増える方向の回転
(右回り)なのに対して、$\theta_{1}$, $\theta_{2}$は
左回りなので、$\theta_{1}=-v'(0)$, $\theta_{2}=-v'(\ell)$.
マトリクス解析の節点力の+の向きは、座標の+の向きに合わせてあり、
構造力学の断面力の向きとは違うので、
節点の近傍を切り取ってつりあいを考えるなら、
$S_{1}=-S(0),\;\; M_{1}=-M(0),\;\; S_{2}=S(\ell),\;\; M_{2}=M(\ell)$.
梁軸を$z$, たわみ方向を$y$とする
($x, y$の2方向のたわみは対等で、$z$軸が特殊なので、
この座標が私の好み)。
よって、$\theta_{1}, \theta_{2}$は、
$x$軸回りの右ねじ回転角になる。
たわみ角$v'(z)$は、$z$が+方向に増加したときに$v$が+方向に増える方向の回転
(右回り)なのに対して、$\theta_{1}$, $\theta_{2}$は
左回りなので、$\theta_{1}=-v'(0)$, $\theta_{2}=-v'(\ell)$.
マトリクス解析の節点力の+の向きは、座標の+の向きに合わせてあり、
構造力学の断面力の向きとは違うので、
節点の近傍を切り取ってつりあいを考えるなら、
$S_{1}=-S(0),\;\; M_{1}=-M(0),\;\; S_{2}=S(\ell),\;\; M_{2}=M(\ell)$.
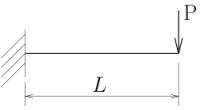
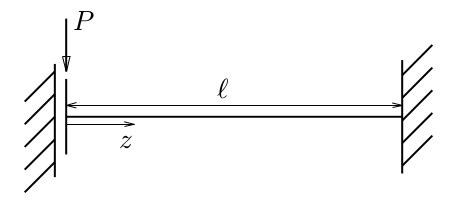 まず、$v_{1}$だけが生じて梁要素が空中でつりあっているような状態を考え、
そのときの節点に作用する力(節点力)を求める。
つまり、$v_{1}$だけが生じるような境界条件を考え、普通に解いて、
そのときの反力や外力を節点力とみなして$v_{1}$で表してやる。
まず、$v_{1}$だけが生じて梁要素が空中でつりあっているような状態を考え、
そのときの節点に作用する力(節点力)を求める。
つまり、$v_{1}$だけが生じるような境界条件を考え、普通に解いて、
そのときの反力や外力を節点力とみなして$v_{1}$で表してやる。
$EIv''''=0$
$EIv'''=A$
$EIv''=Az+B$
$EIv'=\frac{A}{2}z^{2}+Bz+C$
$EIv=\frac{A}{6}z^{3}+\frac{B}{2}z^{2}+Cz+D$
境界条件は
$v'(0)=0$
$S(0)=-EIv'''(0)=-A=-P$
$v(\ell)=0$
$v'(\ell)=0$
$C=0,\;\; B=-\frac{P\ell}{2},\;\; D=\frac{P\ell^{3}}{12}$
$v(z)=\frac{P}{12EI}(2z^{3}-3\ell z^{2}+\ell^{3})$
$M(z)=-EIv''(z)=-Pz+\frac{P\ell}{2}, \;\;S(z)=-EIv'''=-P$
$v_{1}=v(0)=\frac{P\ell^{3}}{12EI}$
$P=\frac{12EI}{\ell^{3}}v_{1}$
$S_{1}=P=\frac{12EI}{\ell^{3}}v_{1}$
$M_{1}=-\frac{P\ell}{2}=-\frac{6EI}{\ell^{2}}v_{1}$
$S_{2}=-P=-\frac{12EI}{\ell^{3}}v_{1}$
$M_{2}=-\frac{P\ell}{2}=-\frac{6EI}{\ell^{2}}v_{1}$
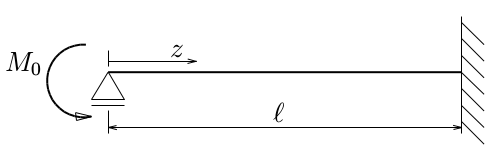 同様に、$\theta_{1}$だけが生じて梁要素が空中でつりあっているような状態を考え、
そのときの節点に作用する力(節点力)を求める。
つまり、$\theta_{1}$だけが生じるような境界条件を考え、普通に解いて、
そのときの反力や外力を節点力とみなして$\theta_{1}$で表してやる。
同様に、$\theta_{1}$だけが生じて梁要素が空中でつりあっているような状態を考え、
そのときの節点に作用する力(節点力)を求める。
つまり、$\theta_{1}$だけが生じるような境界条件を考え、普通に解いて、
そのときの反力や外力を節点力とみなして$\theta_{1}$で表してやる。
$EIv''''=0$
$EIv'''=A$
$EIv''=Az+B$
$EIv'=\frac{A}{2}z^{2}+Bz+C$
$EIv=\frac{A}{6}z^{3}+\frac{B}{2}z^{2}+Cz+D$
境界条件は
$v(0)=0$
$M(0)=-EIv''(0)=-B=-M_{0}$
$v(\ell)=0$
$v'(\ell)=0$
$B=M_{0}, \;\;C=-\frac{M_{0}\ell}{4},\;\; A=-\frac{3M_{0}}{2\ell},\;\; D=0$
$v'(z)=\frac{M_{0}}{4EI}(-\frac{3z^{2}}{\ell}+4z-\ell)$
$M(z)=-EIv''(z)=\frac{3M_{0}}{2\ell}z-M_{0}, \;\;S(z)=-EIv'''=\frac{3M_{0}}{2\ell}$
$\theta_{1}=-v'(0)=\frac{M_{0}\ell}{4EI}$
$M_{0}=\frac{4EI}{\ell}\theta_{1}$
$S_{1}=-S(0)=-\frac{3M_{0}}{2\ell}=-\frac{6EI}{\ell^{2}}\theta_{1}$
$M_{1}=M_{0}=\frac{4EI}{\ell}\theta_{1}$
$S_{2}=S(\ell)=\frac{3M_{0}}{2\ell}=\frac{6EI}{\ell^{2}}\theta_{1}$
$M_{2}=M(\ell)=\frac{M_{0}}{2}=\frac{2EI}{\ell}\theta_{1}$
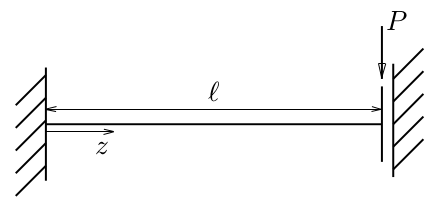 同様に、$v_{2}$だけが生じて梁要素が空中でつりあっているような状態を考え、
そのときの節点に作用する力(節点力)を求める。
つまり、$v_{2}$だけが生じるような境界条件を考え、普通に解いて、
そのときの反力や外力を節点力とみなして$v_{2}$で表してやる。
同様に、$v_{2}$だけが生じて梁要素が空中でつりあっているような状態を考え、
そのときの節点に作用する力(節点力)を求める。
つまり、$v_{2}$だけが生じるような境界条件を考え、普通に解いて、
そのときの反力や外力を節点力とみなして$v_{2}$で表してやる。
$EIv''''=0$
$EIv'''=A$
$EIv''=Az+B$
$EIv'=\frac{A}{2}z^{2}+Bz+C$
$EIv=\frac{A}{6}z^{3}+\frac{B}{2}z^{2}+Cz+D$
境界条件は
$v(0)=0$
$v'(0)=0$
$S(\ell)=-EIv'''(\ell)=-A=P$
$v'(\ell)=0$
$A=-P, \;\; B=\frac{P\ell}{2},\;\;C=0,\;\; D=0$
$v(z)=\frac{P}{12EI}(-2z^{3}+3\ell z^{2})$
$M(z)=-EIv''(z)=Pz-\frac{P\ell}{2}, \;\;S(z)=-EIv'''=P$
$v_{2}=v(\ell)=\frac{P\ell^{3}}{12EI}$
$P=\frac{12EI}{\ell^{3}}v_{2}$
$S_{1}=-S(0)=-P=-\frac{12EI}{\ell^{3}}v_{2}$
$M_{1}=-M(0)=\frac{P\ell}{2}=\frac{6EI}{\ell^{2}}v_{2}$
$S_{2}=P=\frac{12EI}{\ell^{3}}v_{2}$
$M_{2}=M(\ell)=\frac{P\ell}{2}=\frac{6EI}{\ell^{2}}v_{2}$
同様に、$\theta_{2}$だけが生じて梁要素が空中でつりあっているような状態を考え、
そのときの節点に作用する力(節点力)を求める。
つまり、$\theta_{2}$だけが生じるような境界条件を考え、普通に解いて、
そのときの反力や外力を節点力とみなして$\theta_{2}$で表してやる。
$EIv''''=0$
$EIv'''=A$
$EIv''=Az+B$
$EIv'=\frac{A}{2}z^{2}+Bz+C$
$EIv=\frac{A}{6}z^{3}+\frac{B}{2}z^{2}+Cz+D$
境界条件は
$v(0)=0$
$v'(0)=0$
$v(\ell)=0$
$M(\ell)=-EIv''(\ell)=-A\ell-B=M_{0}$
$A=-\frac{3M_{0}}{2\ell},\;\; B=\frac{M_{0}}{2}, \;\;C=0,\;\; D=0$
$v'(z)=\frac{M_{0}}{4EI}(-\frac{3z^{2}}{\ell}+2z)$
$M(z)=-EIv''(z)=\frac{3M_{0}}{2\ell}z-\frac{M_{0}}{2},
\;\;S(z)=-EIv'''=\frac{3M_{0}}{2\ell}$
$\theta_{2}=-v'(\ell)=\frac{M_{0}\ell}{4EI}$
$M_{0}=\frac{4EI}{\ell}\theta_{2}$
$S_{1}=-S(0)=-\frac{3M_{0}}{2\ell}=-\frac{6EI}{\ell^{2}}\theta_{2}$
$M_{1}=-M(0)=\frac{M_{0}}{2}=\frac{2EI}{\ell}\theta_{2}$
$S_{2}=S(\ell)=\frac{3M_{0}}{2\ell}=\frac{6EI}{\ell^{2}}\theta_{2}$
$M_{2}=M_{0}=\frac{4EI}{\ell}\theta_{2}$
重ね合わせが成り立つなら、以上の
$v_{1}$によって生じる節点力、
$\theta_{1}$によって生じる節点力、
$v_{2}$によって生じる節点力、
$\theta_{2}$によって生じる節点力をぜんぶ足し合わせると、
$S_{1}=\frac{12EI}{\ell^{3}}v_{1}
-\frac{6EI}{\ell^{2}}\theta_{1}
-\frac{12EI}{\ell^{3}}v_{2}
-\frac{6EI}{\ell^{2}}\theta_{2}$
$M_{1}=-\frac{6EI}{\ell^{2}}v_{1}
+\frac{4EI}{\ell}\theta_{1}
+\frac{6EI}{\ell^{2}}v_{2}
+\frac{2EI}{\ell}\theta_{2}$
$S_{2}=-\frac{12EI}{\ell^{3}}v_{1}
+\frac{6EI}{\ell^{2}}\theta_{1}
+\frac{12EI}{\ell^{3}}v_{2}
+\frac{6EI}{\ell^{2}}\theta_{2}$
$M_{2}=-\frac{6EI}{\ell^{2}}v_{1}
+\frac{2EI}{\ell}\theta_{1}
+\frac{6EI}{\ell^{2}}v_{2}
+\frac{4EI}{\ell}\theta_{2}$
剛性マトリクスと変位ベクトルの掛け算で表せば、
$
\left(
\begin{array}{c}
S_{1}\\
M_{1}\\
S_{2}\\
M_{2}
\end{array}
\right)
=
\left[
\begin{array}{cccc}
\frac{12EI}{\ell^{3}} &
-\frac{6EI}{\ell^{2}} &
-\frac{12EI}{\ell^{3}}&
-\frac{6EI}{\ell^{2}} \\
-\frac{6EI}{\ell^{2}} &
\frac{4EI}{\ell} &
\frac{6EI}{\ell^{2}} &
\frac{2EI}{\ell} \\
-\frac{12EI}{\ell^{3}} &
\frac{6EI}{\ell^{2}} &
\frac{12EI}{\ell^{3}} &
\frac{6EI}{\ell^{2}} \\
-\frac{6EI}{\ell^{2}} &
\frac{2EI}{\ell} &
\frac{6EI}{\ell^{2}} &
\frac{4EI}{\ell}
\end{array}
\right]
\left(
\begin{array}{c}
v_{1}\\
\theta_{1}\\
v_{2}\\
\theta_{2}
\end{array}
\right)
$
なお、
ここでは
$y$が下向き、$z$が右向きの
$yz$座標系の、
$z$軸に横たわる梁要素に対して、右ねじ系で剛性方程式を導いているから、
$x$軸右ねじ回りのモーメントや回転角は、$yz$平面上では反時計回りに
定義される。
一方、
$y$が下向き、$x$が右向きの
$x$軸に梁要素が横たわる$xy$座標系を用いているテキストでは、
$z$軸右ねじ回りのモーメントや回転角は、$xy$平面上では時計回りに
定義されるので、上に示すマトリクスとは成分の符号が逆になっていたりする
ので、他のテキストや論文等のマトリクスを参照する際は、
常に、どういう座標で定義されているのかについて、
注意が必要である。
せん断変形を考慮した
ティモシェンコ梁のたわみの解法は、
分布荷重がある場合は
静定梁であっても、
$-EIv''''(z)+q(z)=0$を積分して、
回転角
$\theta_{x}(z)=\frac{M'(z)}{GkA}-v'(z)$や
曲げモーメント$M(z)=-EI(v''(z)+\frac{q(z)}{GkA})$
に関する境界条件
を考慮すれば、たぶん解ける。
分布荷重が存在しない場合、$q(z)=0$となり、
$M(z)=-EIv''(z)$がなりたつので、
これを2回積分して、
回転角
$\theta_{x}(z)=\frac{M'(z)}{GkA}-v'(z)$
に関する境界条件を考慮しただけでもたぶん解ける。
但し、こうした境界値問題による解法は、
一般に
計算量が多く、せん断変形が関わる回転角やモーメントの境界条件
(特に分布荷重等)を間違いやすくなるので、
1箇所のたわみを求めたいだけなら、
単位荷重法による解法(単純梁の例)を推奨する
(滝田さんがが分布荷重がある場合について境界値問題で解いてくれた例)。
$-v'(z)$は、たわみ形$v(z)$の傾きだから、中立軸直角面の
傾きに相当するだろう。
ちなみに$v'(z)$に$-$がついているのは、下が$y$軸、右が$z$軸の
座標系で、$x$軸右ねじ回転に合わせるため。
断面の傾き$\theta_{x}(z)$は、
それにせん断ひずみ
$\frac{M'(z)}{GkA}$(次元は角度)を
足したものになる。
$v(z)$はせん断によるたわみ成分を含んでいるから、
$z=0$が固定端でも$v'(0)$は$0$にはならない。
たわみ形を図示すると、固定端に対して直角からせん断ひずみ分の角度だけ
ずれている。
だから、片持ち梁が
固定端と直角になるといった境界条件は、
中立軸直角面の傾き$-v'(z)$に対してではなく、
断面の傾き$\theta_{x}(z)$に対して
与えて解く。という解釈でいいかな。
詳しくは、新体系土木工学7構造物の弾性解析(技報堂)辺り参照。
注意すべきことは、 分布荷重が存在する問題で、 $M(z)=-EIv''(z)$を二回積分したものに、 回転角 $\theta_{x}(z)=\frac{M'(z)}{GkA}-v'(z)$ に関する境界条件を用いて解くと、 先端に集中荷重を受ける片持ち梁や 中央に集中荷重を受ける単純梁といった問題では、 たまたま正しい答えが得られるが、 分布荷重を受ける問題では、正解が求まらない。 $M(z)=-EI(v''(z)+\frac{q(z)}{GkA})$や $-EIv''''(z)+q(z)=0$から 解くべき。 滝田さんが根気強く単位荷重法と比較したりしてくれた おかげで、この間違いに気づかせていただいた (単位荷重法だと正解が求まる)。
様々な構造力学教材を開発しておられる加藤 才治さん (一例は ここ とか)から、 「せん断はり」の相談を受けて知ったのだが、 集中荷重を受ける単純梁など、多くの代表的な梁のせん断たわみ項は、 その梁の曲げモーメントをせん断剛性($GkA$)で割ったものになっているようだ。 等分布荷重を受ける片持ち梁の場合 や集中モーメントを受ける場合など、 必ずしもそうはならない (計算間違いかもしれないが、通常の解法だと曲げモーメントとちょっとずれる) 場合もあるかもしれないので、 どういう場合に成り立つのかは、まだ調査中ではあるが、 曲げモーメントを流用してせん断たわみを求められるなら、 ここ以下に示すような(回転角についての境界条件を考慮したり、 単位荷重法を用いたりといった)めんどくさいことをしなくても ティモシェンコ梁のたわみが簡単に求められることになる (弾性荷重法のようなトリッキーな方法だが)。 どうして、それが成り立つのか以下に少し考えてみる。
ティモシェンコ梁の曲げモーメントは以下で示される
(参考)。
$M(z)=-EI(v''-\gamma')$
これを変形して
$$v''=-\frac{M}{EI}+\gamma'$$
$$v'=-\int\frac{M}{EI}dx+\gamma+B$$
$B$は$M(z)$と$\gamma'(z)$を1回積分したことによる積分定数。
$S(z)=GkA\gamma(z)$より
$$v'=-\int\frac{M}{EI}dx+\frac{S}{GkA}+B$$
もう一回積分して
$$v=-\int(\int\frac{M}{EI}dx)dx+\frac{\int S dz}{GkA}+Bz+C$$
$C$は、$(\int\frac{M}{EI}dx)$と$S$を積分したことによる積分定数。
$$v=-\int(\int\frac{M}{EI}dx)dx+\frac{M}{GkA}+Bz+C$$
さて、せん断変形を考慮せずに$v''=-\frac{M}{EI}$を2回積分した場合、
曲げたわみの項は
$$v_{曲げ}=-\int(\int\frac{M}{EI}dx)dx+Bz+C$$
と求まり、積分定数$B$, $C$は、境界条件や連続条件から決まる。
だから、残りの$\frac{M}{GkA}$がせん断たわみの項で、
曲げモーメントをせん断剛性で割ったものであると考えていいのかどうか、
ちょっとまだわからない。
回転角に関する境界条件を考慮した際に、
$B$や$C$にせん断に関する項が入ってきたら、成り立たないのではないかとか。
この辺については、今後の検討課題(ネタ)としておく。
回転角についての境界条件から求める場合
$-EIv''''=0$
$-EIv'''=B$
$-EIv''=Bz+C$
$-EIv'=\frac{B}{2}z^{2}+Cz+D$
$-EIv=\frac{B}{6}z^{3}+\frac{C}{2}z^{2}+Dz+E$
境界条件:$v(0)=0$
$0=\theta_{x}(0)=\frac{M'(0)}{GkA}-v'(0)=\frac{-B}{GkA}-D$
$0=M(\ell)=-EIv''(\ell)=-B\ell-C$
$P=S(\ell)=-EIv'''(\ell)=-B$
$v=\frac{P}{6EI}(3\ell z^{2}-z^{3})+\frac{P}{GkA}z$
$v(\ell)=\frac{P\ell^{3}}{3EI}+\frac{P\ell}{GkA}$
$\frac{せん断たわみ項}{曲げたわみ項}=\frac{3EI}{\ell^{2}GkA}$
以下は分布荷重がない場合特有の解き方
 $M=P(z-\ell)$
$M=P(z-\ell)$
$M=-EIv''$より
$EIv''=P(\ell-z)$
$EIv'=P(\ell z-\frac{z^{2}}{2})+A$
$EIv=P(\frac{\ell}{2}z^{2}-\frac{z^{3}}{6})+Az+B$
境界条件:$v(0)=0, \theta_{x}(0)=0$
$v(0)=0よりB=0$
$\theta_{x}(z)=\frac{M'(z)}{GkA}-v'(z)
=\frac{P}{GkA}-\frac{P}{EI}(\ell z-\frac{z^{2}}{2})-\frac{A}{EI}$
$\theta_{x}(0)
=\frac{P}{GkA}-\frac{A}{EI}=0$
$\frac{A}{EI}=\frac{P}{GkA}$
$v=\frac{P}{6EI}(3\ell z^{2}-z^{3})+\frac{P}{GkA}z$
$v(\ell)=\frac{P\ell^{3}}{3EI}+\frac{P\ell}{GkA}$
$\frac{せん断たわみ項}{曲げたわみ項}=\frac{3EI}{\ell^{2}GkA}$
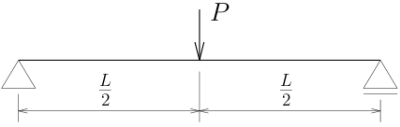 集中荷重の問題は、
$-EIv''''+q=0$の境界値問題で解くと、
一箇所の場合分け区間ごとに積分定数が4つずつ出てきて大変なので、
1点のたわみさえわかればいいのであれば、単位荷重法が楽であろう
(間違いやすいせん断変形が関わる境界条件も考えなくてすむし)。
集中荷重の問題は、
$-EIv''''+q=0$の境界値問題で解くと、
一箇所の場合分け区間ごとに積分定数が4つずつ出てきて大変なので、
1点のたわみさえわかればいいのであれば、単位荷重法が楽であろう
(間違いやすいせん断変形が関わる境界条件も考えなくてすむし)。
$M(z)=\frac{P}{2}z \;\;\;(0\le z\le\frac{\ell}{2})$
$M(z)=\frac{P}{2}(\ell-z) \;\;\;(\frac{\ell}{2}\le z\le \ell)$
$S(z)=\frac{P}{2} \;\;\;(0\le z\le\frac{\ell}{2})$
$S(z)=-\frac{P}{2} \;\;\;(\frac{\ell}{2}\le z\le \ell)$
$$v(\frac{\ell}{2})=
\int_{0}^{\ell}
\frac{M\overline{M}}{EI}dz
+
\int_{0}^{\ell}
\frac{S\overline{S}}{GkA}dz
$$
$$=
\int_{0}^{\frac{\ell}{2}}\frac{ \frac{P}{2}z\frac{1}{2}z }{EI}dz
+
\int_{\frac{\ell}{2}}^{\ell}\frac{ \frac{P}{2}(\ell-z)\frac{1}{2}(\ell-z) }{EI}dz
$$
$$+
\int_{0}^{\frac{\ell}{2}}\frac{ \frac{P}{2}\frac{1}{2} }{GkA}dz
+
\int_{\frac{\ell}{2}}^{\ell}\frac{ -\frac{P}{2}(-\frac{1}{2}) }{GkA}dz
$$
$$=\frac{P\ell^{3}}{48EI}+\frac{P\ell}{4GkA}$$
以下は分布荷重がない場合特有の解き方
$0\le z\le\frac{\ell}{2}$について
$-EIv''_{左}=\frac{P}{2}z$
$-EIv'_{左}=\frac{P}{4}z^{2}+A$
$-EIv_{左}=\frac{P}{12}z^{3}+Az+B$
$\frac{\ell}{2}\le z\le \ell$について
$-EIv''_{右}=\frac{P}{2}(\ell-z)$
$-EIv'_{右}=\frac{P}{2}(\ell z-\frac{z^{2}}{2})+C$
$-EIv_{右}=\frac{P}{2}(\frac{\ell}{2}z^{2}-\frac{z^{3}}{6})+Cz+D$
境界条件は
$v_{左}(0)=0$
$v_{右}(\ell)=0$
連続条件は
$v_{左}(\frac{\ell}{2})=v_{右}(\frac{\ell}{2})$
$\theta_{左}(\frac{\ell}{2})=\theta_{右}(\frac{\ell}{2})$
$v_{左}(0)=0$から$B=0$
$v_{右}(\ell)=0$から$\ell C+D=-\frac{P\ell^{3}}{6}$
$v_{左}(\frac{\ell}{2})=v_{右}(\frac{\ell}{2})$
から$\frac{\ell}{2}A-\frac{\ell}{2}C-D=\frac{P\ell^{3}}{24}$
$\theta_{左}(\frac{\ell}{2})=\theta_{右}(\frac{\ell}{2})$から
$\frac{P}{2GkA}+\frac{P}{4EI}(\frac{\ell}{2})^{2}+\frac{A}{EI}
=
-\frac{P}{2GkA}+\frac{P}{2EI}(\frac{\ell^{2}}{2}-\frac{\ell^{2}}{8})+\frac{C}{EI}
$
$A-C=-\frac{PEI}{GkA}+\frac{P\ell^{2}}{8}$
これを解くと、
$A=-\frac{P\ell^{2}}{16}-\frac{PEI}{2GkA}$
$B=0$
$v=\frac{P}{48EI}(3\ell^{2}z-4z^{3})+\frac{P}{2GkA}z$
$(0\le z\le\frac{\ell}{2})$
$v(\frac{\ell}{2})=\frac{P\ell^{3}}{48EI}+\frac{P\ell}{4GkA}$
$\frac{せん断たわみ項}{曲げたわみ項}=\frac{12EI}{\ell^{2}GkA}$
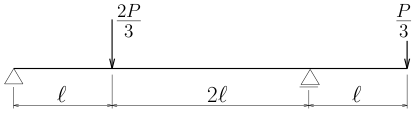 集中荷重の問題は、
$-EIv''''+q=0$の境界値問題で解くと、
一箇所の場合分け区間ごとに積分定数が4つずつ出てきて大変なので、
1点のたわみさえわかればいいのであれば、単位荷重法が楽であろう
(間違いやすいせん断変形が関わる境界条件も考えなくてすむし)。
集中荷重の問題は、
$-EIv''''+q=0$の境界値問題で解くと、
一箇所の場合分け区間ごとに積分定数が4つずつ出てきて大変なので、
1点のたわみさえわかればいいのであれば、単位荷重法が楽であろう
(間違いやすいせん断変形が関わる境界条件も考えなくてすむし)。
$M(z)=\frac{P}{3}z \;\;\;(0\le z\le \ell)$
$M(z)=\frac{P}{3}(-z+2\ell) \;\;\;(\ell\le z\le 3\ell)$
$M(z)=\frac{P}{3}(z-4\ell) \;\;\;(3\ell\le z\le 4\ell)$
$S(z)=\frac{P}{3} \;\;\;(0\le z\le \ell)$
$S(z)=-\frac{P}{3} \;\;\;(\ell\le z\le 3\ell)$
$S(z)=\frac{P}{3} \;\;\;(3\ell\le z\le 4\ell)$
$\frac{2P}{3}$載荷位置のたわみ$v(\ell)$を求めたいとして、
そこに単位荷重をかけると、
$M(z)=\frac{2}{3}z \;\;\;(0\le z\le \ell)$
$M(z)=\frac{1}{3}(-z+3\ell) \;\;\;(\ell\le z\le 3\ell)$
$M(z)=0 \;\;\;(3\ell\le z\le 4\ell)$
$S(z)=\frac{2}{3} \;\;\;(0\le z\le \ell)$
$S(z)=-\frac{1}{3} \;\;\;(\ell\le z\le 3\ell)$
$S(z)=0 \;\;\;(3\ell\le z\le 4\ell)$
$$v(\ell)=
\int_{0}^{4\ell}
\frac{M\overline{M}}{EI}dz
+
\int_{0}^{4\ell}
\frac{S\overline{S}}{GkA}dz
$$
$$=
\int_{0}^{\ell}\frac{ \frac{P}{3}z\frac{2}{3}z }{EI}dz
+
\int_{\ell}^{3\ell}\frac{ \frac{P}{3}(2\ell-z)\frac{1}{3}(3\ell-z) }{EI}dz
$$
$$+
\int_{0}^{\ell}\frac{ \frac{P}{3}\frac{2}{3} }{GkA}dz
+
\int_{\ell}^{3\ell}\frac{ -\frac{P}{3}(-\frac{1}{3}) }{GkA}dz
$$
$$=\frac{4P\ell^{3}}{27EI}+\frac{4P\ell}{9GkA}$$
以下は分布荷重がない場合特有の解き方
$0\le z\le \ell$について
$-EIv''_{1}=\frac{P}{3}z$
$-EIv'_{1}=\frac{P}{6}z^{2}+A$
$-EIv_{1}=\frac{P}{18}z^{3}+Az+B$
$\ell\le z\le 3\ell$について
$-EIv''_{2}=\frac{P}{3}(-z+2\ell)$
$-EIv'_{2}=\frac{P}{3}(-\frac{z^{2}}{2}+2\ell z)+C$
$-EIv_{2}=\frac{P}{3}(-\frac{z^{3}}{6}+\ell z^{2})+Cz+D$
 境界条件:$v_{1}(0)=0, v_{2}(3\ell)=0$より
境界条件:$v_{1}(0)=0, v_{2}(3\ell)=0$より
$B=0$
$D=-3\ell C-\frac{3}{2}P\ell^{3}$
連続条件:$v_{1}(\ell)=v_{2}(\ell), \theta_{1}(\ell)=\theta_{2}(\ell)$より
$A+2C=-\frac{23P\ell^{2}}{18}$
$\frac{P}{3GkA}+\frac{P\ell^{2}}{6EI}+\frac{A}{EI}
=-\frac{P}{3GkA}+\frac{P\ell^{2}}{3EI}(-\frac{1}{2}+2)+\frac{C}{EI}$
$A-C=\frac{P\ell^{2}}{3}-\frac{2EIP}{3GkA}$
$A=-\frac{11P\ell^{2}}{54}-\frac{4EIP}{9GkA}$
$v_{1}(z)=\frac{P}{54EI}(-3z^{3}+11\ell^{2}z)+\frac{4Pz}{9GkA}$
$v_{1}(\ell)=\frac{4P\ell^{3}}{27EI}+\frac{4P\ell}{9GkA}$
$\frac{せん断たわみ項}{曲げたわみ項}=\frac{3EI}{\ell^{2}GkA}$
弾性荷重法による検算(pdf)
ところで、この逆対称4点曲げ試験法を
大野式というようだ。
字面を見た(聞いた)だけでほぼ一目瞭然の「逆対称4点曲げ」に
対して、例えば「大野式曲げ試験」とだけ言ったのでは
知っている人にしか分からないから、
最初に思いついた人に敬意を表するという意味では、
「大野による逆対称4点曲げ試験」というような言い方の方が
望ましいと思うのだがどうだろうか。
私は定理や公式、法則、経験式などに「ピタゴラスの定理」みたいな
人の名前をつけるよりは「三平方の定理」みたいに、その内容がわかる
名前をつけた方がよいと思っている。
集成材梁は曲げ試験をするのは簡単なので曲げヤング率は測定しやすいが、 圧縮試験や引張試験をするのは難しいので軸方向ヤング率を測定するのは難しい。 立体要素で有限要素解析するときにほしいのは軸方向ヤング率なので、 曲げヤング率からおよその軸方向ヤング率を見積もりたい場合は多い。
単純梁の中央に1点載荷する3点曲げ試験の場合、中央部のたわみは
$v=\frac{P\ell^{3}}{48E_{z}I}+\frac{P\ell}{4GkA}$
となる。
$E_{z}$は軸方向ヤング率である。
曲げヤング率$E_{b}$は、上式のせん断変形項を無視して、
$v=\frac{P\ell^{3}}{48E_{b}I}$
として求めたものである。ということは、軸方向ヤング率$E_{z}$と
曲げヤング率$E_{b}$には以下の関係がある。
$\frac{P\ell^{3}}{48E_{z}I}+\frac{P\ell}{4GkA}
=\frac{P\ell^{3}}{48E_{b}I}$
これを変形すると、
$\frac{1}{E_{z}}+\frac{12I}{GkA\ell^{2}}=\frac{1}{E_{b}}$
となるが、長方形断面であれば、$I=\frac{bh^{3}}{12}$を代入して、
$\frac{1}{E_{z}}+\frac{1}{kG}(\frac{h}{\ell})^{2}=\frac{1}{E_{b}}$
となる。
せん断補正係数を$k=\frac{5}{6}$,
せん断弾性係数を$G=\frac{E_{z}}{15}$とすると、
$kG=\frac{5}{6}\cdot \frac{E_{z}}{15}=\frac{E_{z}}{18}$となり
$\frac{1}{E_{z}}+\frac{18}{E_{z}}(\frac{h}{\ell})^{2}=\frac{1}{E_{b}}$
となる。
例えば、桁高/スパン$\frac{h}{\ell}=\frac{1}{10}$の梁であれば、 $E_{z}=1.18E_{b}$となる。
せん断変形を考慮した片持ち梁のたわみは
$\delta = \frac{P\ell^{3}}{3EI}+\frac{P\ell}{GkA}$
で表される。
せん断変形を考慮した片持ち梁のたわみは
$\delta = \frac{P\ell^{3}}{3E_{s}I_{s}}+\frac{P\ell}{G_{s}kA_{s}}$
となるが、$G_{s}=\frac{E_{s}}{2(1+\nu)}$
程度にしか$G_{s}kA_{s}$が
$3E_{s}I_{s}$より小さくないため、せん断変形の影響は小さく、
$\ell/h=10$程度のそこそこ細長い梁だと
(初等梁に対する)せん断変形の影響はせいぜい1%以下程度にしかならない。
せん断変形を考慮した片持ち梁のたわみは
$\delta = \frac{P\ell^{3}}{3E_{w}I_{w}}+\frac{P\ell}{G_{w}kA_{w}}$
となるが、$\frac{E_{w}}{G_{w}}\cong 15$
程度に$G_{w}kA_{w}$が
$3E_{w}I_{w}$より小さいため、せん断変形がそれなりに大きく、
$\ell/h=10$程度のそこそこ細長い梁でも
(初等梁に対する)せん断変形の影響は5%程度になる。
せん断変形を考慮した片持ち梁のたわみは
$\delta = \frac{P\ell^{3}}{3(E_{w}I_{w}+E_{s}I_{s})}
+\frac{P\ell}{(G_{w}kA\sim G_{w}kA_{w}+G_{s}kA_{s})}$
となる。
せん断剛性の見積りは簡単ではないが、
FEMは、
$G_{w}kA\sim G_{w}kA_{w}+G_{s}kA_{s}$
の間で、
$G_{w}kA$
を用いたときに近い値を出している。
さて、$3(E_{w}I_{w}+E_{s}I_{s})$
は、鋼材を挟んだことでかなり大きくなっているのに対して、
せん断剛性
($G_{w}kA\sim G_{w}kA_{w}+G_{s}kA_{s}$
の$G_{w}kA$より)は、木材のせん断剛性なみにかなり小さい。
そのため、
せん断変形は木材のみの場合よりも更に大きくなり、
$\ell/h=10$程度のそこそこ細長い梁でも
(初等梁に対する)せん断変形の影響は20%程度にもなる。
つまり、鋼板挿入集成材は、
木材のみの梁よりもせん断変形が大きくなる特殊な梁であり、
せん断変形を無視して扱うことはできない。
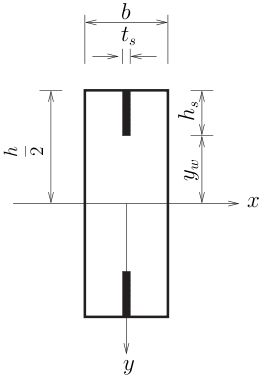 初等梁の直応力とつりあうようなせん断応力は、
初等梁の直応力とつりあうようなせん断応力は、
$\tau_{yz}(y,z)=-\frac{S(z)Q(y)}{b(y)I}$
と与えられる。$S(z)$は断面のせん断力、
$Q(y)$は断面一次関数、$b(y)$は高さ$y$における断面の幅なので
長方形断面では$b$でいいだろう。
断面二次モーメント$I$を木材のヤング率で換算するなら
$I=\frac{E_{w}I_{w}+E_{s}I_{s}}{E_{w}}$
となるから、
$\tau_{yz}(y,z)=-\frac{E_{w}S(z)Q(y)}{b(E_{w}I_{w}+E_{s}I_{s})}$
となる。
桁上部の鋼板挿入部分($-\frac{h}{2}<y<-y_{w}$)
の断面積を木材のヤング率で換算すると
$\frac{E_{w}(b-t_{s})h_{s}+E_{s}t_{s}h_{s}}{E_{w}}$
$=\{(b-t_{s})+\frac{E_{s}}{E_{w}}t_{s}\}h_{s}$
$=b_{n}h_{s}$
と表せることから、
鋼板が挿入されている部分の
集成材換算幅$b_{n}$を
$b_{n}=(b-t_{s})+\frac{E_{s}}{E_{w}}t_{s}$
と定義する。
桁上部の鋼板挿入部分($-\frac{h}{2}<y<-y_{w}$)
の断面1次関数$Q_{s}(y)$は
$Q_{s}(y)=
\int_{-\frac{h}{2}}^{y}yb_{n}dy$
$=b_{n}[\frac{y^{2}}{2}]_{-\frac{h}{2}}^{y}
=\frac{b_{n}}{2}(y^{2}-\frac{h^{2}}{4})$
で与えられる。
図心($y=0$)よりも桁上部$(-y_{w}<y<0)$の鋼板のない部分の
断面1次関数$Q_{w}(y)$は
$Q_{w}(y) =
Q_{s}(-y_{w})
+\int_{-y_{w}}^{y}ybdy$
$=\frac{b_{n}}{2}(y_{w}^{2}-\frac{h^{2}}{4})
+\frac{b}{2}(y^{2}-y_{w}^{2})$
で与えられる。以上より、
鋼板挿入集成材梁の中立軸位置のせん断応力は、
$\tau_{yz}(y,z)=-\frac{E_{w}S(z)}{b(E_{w}I_{w}+E_{s}I_{s})}
\{\frac{b_{n}}{2}(y_{w}^{2}-\frac{h^{2}}{4})
+\frac{b}{2}(y^{2}-y_{w}^{2})\}$
に$y=0$を代入すれば求まる。
挿入鋼板が上下対称でなくて、中立軸の位置がずれて
くるような場合は、中立軸位置を求めてから同様に
断面一次関数の積分を行って求める。
以下は、ばねが1本切れる問題は、1自由度系に ステップ荷重が加わる問題でいいのかということをチェックしようと した当初のメモなので、色々と不正確な表現もあるかと。 1自由度系の基礎からちゃんと解き直したものは、 構造力学特論テキストの1自由度系の振動。
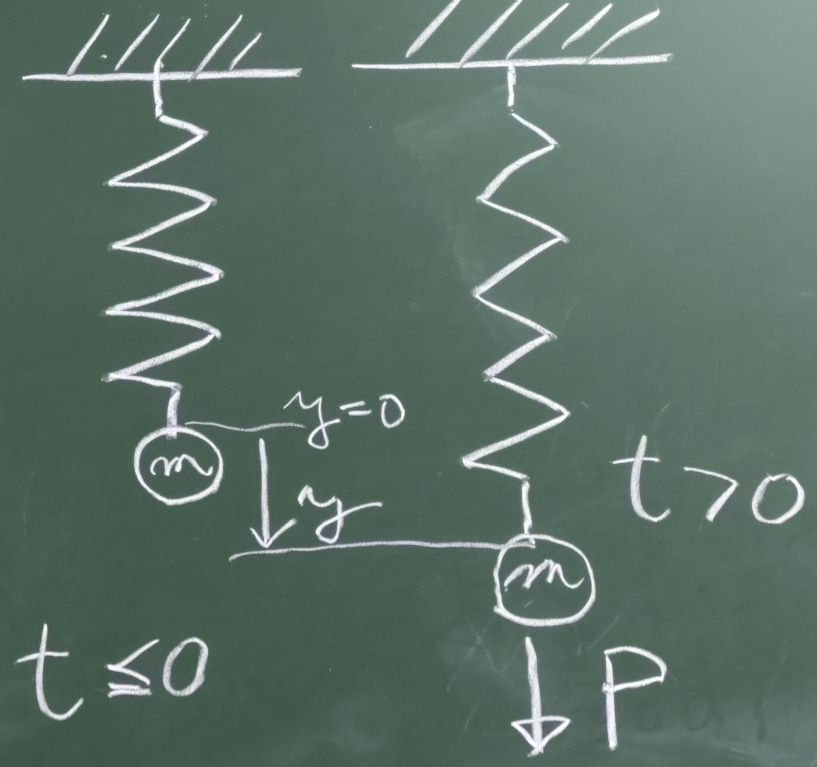 まず、1自由度系で、時刻$t=0$で、質点に荷重$P$が加わった場合を考える。
つまり、
まず、1自由度系で、時刻$t=0$で、質点に荷重$P$が加わった場合を考える。
つまり、
$f(t)=
\begin{cases}
0 & \;\;\;\;(t\le 0)\\
P & \;\;\;\;(0\lt t)
\end{cases}
$
のステップ荷重が質点に作用するということ。
$t\gt 0$での運動方程式は、
$m\ddot{y}+ky=P$
ただし、$y(0)=0, \;\;\dot{y}(0)=0$
ばねの自然長から
静的に$P$を載荷したときの変位$y_{静}$は、
$y_{静}=\frac{P}{k}$
運動方程式を変形し、
$m\ddot{y}=-k(y-\frac{P}{k})$
ここで、
$Y=y-\frac{P}{k}$ とおくと、
$m\ddot{Y}=-kY$
$\ddot{Y}+\frac{k}{m}Y=0$
ここで、$\omega^{2}=\frac{k}{m}$つまり、$\omega=\sqrt{\frac{k}{m}}$とおくと、
$\ddot{Y}+\omega^{2}Y=0$
これの一般解は、
$Y=A\sin\omega t+B\cos\omega t$
と書ける。
$\dot{y}=\omega A\cos\omega t-\omega B\sin\omega t$
$\dot{y}(0)=\omega A=0$より、$A=0$
$Y(0)=B=y(0)-\frac{P}{k}$
$y(0)=0$より$B=-\frac{P}{k}$
つまり、$Y=-\frac{P}{k}\cos\omega t$
$y=Y+\frac{P}{k}$だから
$y=-\frac{P}{k}\cos\omega t+\frac{P}{k}$
$y=\frac{P}{k}(1-\cos\omega t)$
1自由度系に
ステップ荷重が作用した場合の解き方として、以上の解き方でいいのかどうか、
ちょっと自信がない。というのは、
金沢大学機械機能設計研究室の資料(
衝撃応答・破壊の基礎)などでは、
$Pf(t)$の動荷重を受ける場合の解は、
$y=y_{静}\int_{0}^{t}\omega\sin(\omega t) f(t-\tau)d\tau$
みたいな畳込み積分で与えられるとしているのだが、
じゃあ、これも計算してみると、
$y_{静}=\frac{P}{k}, f(t)=1$だから
$y=\frac{P}{k}\int_{0}^{t}\omega\sin(\omega\tau)d\tau$
$=\frac{P}{k}[-\cos\omega\tau]_{0}^{t}$
$=\frac{P}{k}(1-\cos\omega t)$
となり、同じ結果になるから、まあ、いいのではないだろうか。
(構造力学特論のテキストでちゃんと解いてみた)
 動的増幅率$DAF$の定義はいくつかあるようだが、
振動工学などで一般的な?
動的変位/静的変位として計算すると、
動的増幅率$DAF$の定義はいくつかあるようだが、
振動工学などで一般的な?
動的変位/静的変位として計算すると、
$DAF=\frac{y}{y_{静}}=1-\cos\omega t$
となるので、その最大値は
$\omega t=(2n-1)\pi$のときの$DAF_{max}=2$ となる。
仮に
$DAF=\frac{y-y_{0}}{y_{静}-y_{0}}$
$y_{0}$は初期値とか健全時の変位。
とかを使うとしても、
この場合は、$y_{0}=0$なので、$DAF$は変わらない
(ということでいいか?)
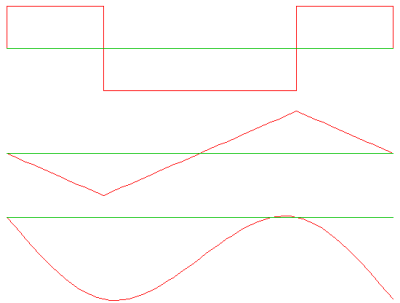
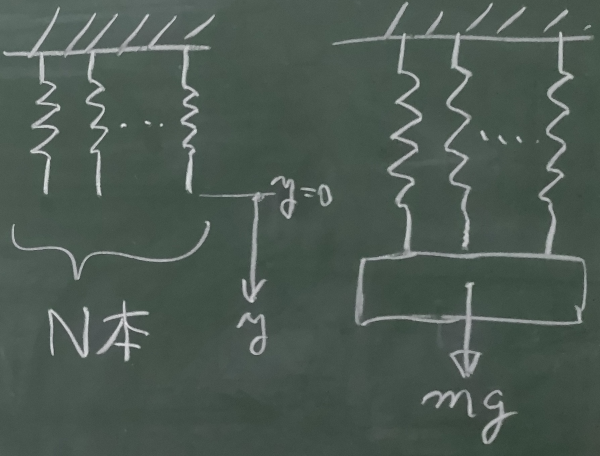 $N$本のばねに質量$m$の重りがくっついていて、
$t\le 0$では静止状態(健全時)、$t\gt 0$ではばねが1本切れていることにする。
つまり、合成ばねのばね定数を$K(t)$とすると、
$N$本のばねに質量$m$の重りがくっついていて、
$t\le 0$では静止状態(健全時)、$t\gt 0$ではばねが1本切れていることにする。
つまり、合成ばねのばね定数を$K(t)$とすると、
$K(t)=
\begin{cases}
Nk & \;\;\;\;(t\le 0)\\
(N-1)k & \;\;\;\;(0\lt t)
\end{cases}
$
以下は、佐伯先生のメモを
上記の減衰なし1自由度系
の表記に合わせて、トレースしてみたもの。
$t\gt 0$での運動方程式は、
$m\ddot{y}+(N-1)ky=mg$
ただし、$y(0)=y_{健}, \;\;\dot{y}(0)=0$
$y$の原点は、重りがくっついてない状態でのばねの自然長の先端とする
(その方が、式はたてやすい)。
$t\le 0$のばねが切れていない状態(健全時)の変位
$y_{健}$は、
$y_{健}=\frac{mg}{Nk}$
運動方程式を変形すると
$m\ddot{y}=-(N-1)ky+mg$
$m\ddot{y}=-(N-1)k\left(y-\frac{mg}{(N-1)k}\right)$
ここで、
$Y=y-\frac{mg}{(N-1)k}$とおく。$\ddot{Y}=\ddot{y}$となるから、上の式は
$m\ddot{Y}=-(N-1)kY$
と書ける。
$\ddot{Y}+\frac{(N-1)k}{m}Y=0$
ここで、$\omega^{2}=\frac{(N-1)k}{m}$つまり、$\omega=\sqrt{\frac{(N-1)k}{m}}$とおくと、
$\ddot{Y}+\omega^{2}Y=0$
これの一般解は、
$Y=A\sin\omega t+B\cos\omega t$
と書ける。$Y=y-\frac{mg}{(N-1)k}$より
$y=A\sin\omega t+B\cos\omega t+\frac{mg}{(N-1)k}$
$\dot{y}=\omega A\cos\omega t-\omega B\sin\omega t$
$\dot{y}(0)=\omega A=0$より、$A=0$ よって
$y=B\cos\omega t+\frac{mg}{(N-1)k}$
$y(0)=B+\frac{mg}{(N-1)k}=\frac{mg}{Nk}$
$B=\frac{mg}{Nk}-\frac{mg}{(N-1)k}=-\frac{mg}{N(N-1)k}$
$y=-\frac{mg}{N(N-1)k}\cos\omega t+\frac{mg}{(N-1)k}$
$y=\frac{mg}{(N-1)k}(1-\frac{\cos\omega t}{N})$ と求まる。
ばねが1本切れた状態の静的な変位$y_{静}$は、
$y_{静}=\frac{mg}{(N-1)k}$
ばねの自然長を原点としたままで、
動的変位/静的変位を$DAF_{自}$と定義すると、
$DAF_{自}=\frac{y}{y_{静}}=1-\frac{\cos\omega t}{N}$
となり、その最大値は、
$DAF_{自max}=1+\frac{1}{N}$となり、2にはならない。
そこで、$t\le 0$の健全時を基準にした変位どうしの比を用いて、
$DAF=\frac{y-y_{健}}{y_{静}-y_{健}}$と定義される$DAF$を求めてみる。
$y-y_{健}
=\frac{mg}{(N-1)k}(1-\frac{\cos\omega t}{N})-\frac{mg}{Nk}$
$=\frac{mg}{k}\left(\frac{N-\cos\omega t-(N-1)}{N(N-1)}\right)$
$=\frac{mg}{k}\cdot\frac{1-\cos\omega t}{N(N-1)}$
$y_{静}-y_{健}
=\frac{mg}{(N-1)k}-\frac{mg}{Nk}$
$=\frac{mg}{k}\cdot\frac{1}{N(N-1)}$
よって、
$DAF=\frac{y-y_{健}}{y_{静}-y_{健}}=1-\cos\omega t$
となり、上記の1自由度系にステップ荷重$P$をかける場合と同じになる。
最大値は、$\omega t=(2n-1)\pi$のときの$DAF_{max}=2$
さて、上記の健全時を基準にした変位は、
$y-y_{健}=\frac{mg}{N(N-1)k}(1-\cos\omega t)$
であるが、
これを1自由度系にステップ荷重$P$の場合の以下の式と比べてみる。
$y_{ステップP}=\frac{P}{k}(1-\cos\omega t)$
ばねが切れる問題は、ステップ荷重の問題の
$k$を$(N-1)k$に、$P$を$\frac{mg}{N}$に置き換えた式になっているから、
$N$本のばねが1本切れる問題は、
$(N-1)$本のばねにくっついた重りに
$\frac{mg}{N}$のステップ荷重(ばねが1本切れた場合の荷重の変化)
が作用した問題と同じだということになるだろうか。
なぜ、そうなるのかは、次項で考察したい。
 $t\le 0$の健全時の状態を変位$y$の原点にとれば(つまり、$y_{健}=0$)、
$t\le 0$の健全時の状態を変位$y$の原点にとれば(つまり、$y_{健}=0$)、
$DAF=\frac{y-y_{健}}{y_{静}-y_{健}}$
みたいに、健全時の変位を引いたりせずに、
$DAF=\frac{y}{y_{静}}$
で、$DAF$を評価できるのではないだろうか。
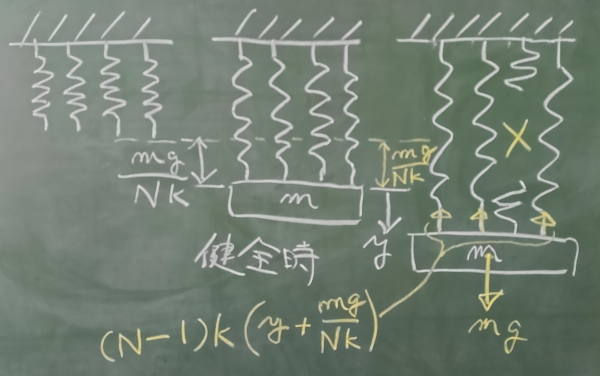
$t\gt 0$でばねが1本切れた状態の運動方程式を考えてみる。
自然長からのばねののびは、
健全時を基準とした$y$に、自然長から健全時までの伸び$y_{健}=\frac{mg}{Nk}$を
足した$y+\frac{mg}{NK}$で表される。
ばねに作用する力は、この自然長からの伸びに、
$(N-1)$本のばねのばね定数$(N-1)k$をかけたものとなるから、運動方程式は、
以下のように表される。
$m\ddot{y}+(N-1)k\left(y+\frac{mg}{Nk}\right)=mg$
これを変形すると
$m\ddot{y}+(N-1)ky+\frac{N-1}{N}mg=mg$
$m\ddot{y}+(N-1)ky=\frac{mg}{N}$
これと1自由度系にステップ荷重$P$の
場合の以下の運動方程式と比べてみる。
$m\ddot{y}+ky=P$
$k$を$(N-1)k$に、$P$を$\frac{mg}{N}$に置き換えた式になっているから、
$N$本のばねが1本切れる問題は、
$(N-1)$本のばねにくっついた重りに、
$\frac{mg}{N}$のステップ荷重(ばねが1本切れた前後の荷重の変化)
が作用した問題と同じだということになりそうだ
(ただし、変位の基準は$N$本のばねがある健全時)。
そうすると、ステップ荷重$P$の変位
$y_{ステップ}=\frac{P}{k}(1-\cos\omega t)$
の$P$を$\frac{mg}{N}$に、$k$を$(N-1)k$に置き換えたものが、
変位ということになるから、健全時を基準とした変位$y_{健基}$は、
$y_{健基}=\frac{mg}{N(N-1)k}(1-\cos\omega t)$
となり、当然のことながら、自然長を原点とした$y$から健全時の
変位を引いた
$y-y_{健}=\frac{mg}{N(N-1)k}(1-\cos\omega t)$
と同じ式になる。
ケーブル破断の衝撃係数として多用される1.854は、 Fatigue evaluation and redundancy analysis : Bridge No. 9340, I-35W over Mississippi Riverの文献からとってきているようだ。 この文献はまだ入手していないので、具体的にどう求めているかは 確認していない。 ばね1本とダッシュポット1個(減衰定数$\beta=0.05$)の1自由度系にステップ荷重を作用させた際の 動的増幅率($DAF$)が1.854になるということらしい。
1自由度系がステップ荷重を受ける場合の変位の応答は、
インパルス応答を畳み込み積分して求められるようなのだが、
熊大機械の
鳥越 一平先生の授業関係資料の
過渡振動で求められている結果を、上記の表記に合わせて書き直すと、
$DAF=
1-e^{-\beta\omega t}(\frac{\omega}{\omega_{d}}\beta\sin\omega_{d}t+\cos\omega_{d}t)$
ただし、$\omega_{d}=\omega\sqrt{1-\beta^{2}}$
のように表される(構造力学特論テキストでちゃんと解いてみた)。
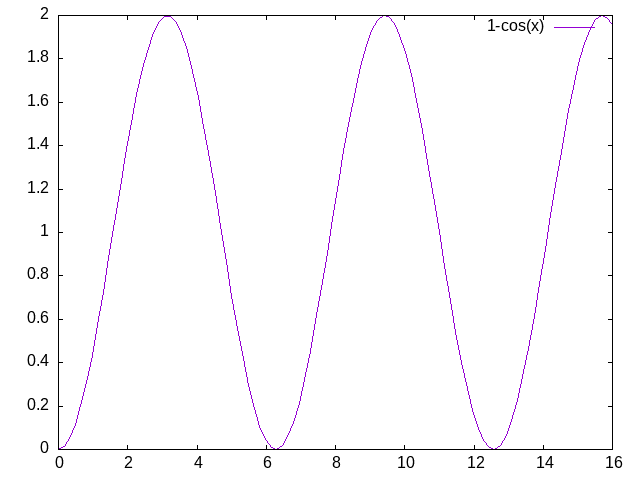
ここで、$\beta=0$のときは、$DAF=1-\cos\omega_{d}t$となるので、
減衰なしのときの$DAF$の最大値は$\omega_{d}t=\pi$のときで$DAF_{max}=2$となる。
では、衝撃係数1.854の文献が仮定している
$\beta=0.05$を代入し、
下のグラフからわかるように最大値となる
$\omega_{d}t=\pi$を代入すると、
$DAF=1-e^{-0.05\pi}(0.05\sin\pi+\cos\pi)=1+e^{-0.05\pi}=1.854635999153233$
と求まる。
四捨五入したら1.854ではなく1.855だと思うが、
もしかして1.854は$1+e^{-0.05\pi}$からではなく数値的に求めた値だったりするだろうか?
2024/12/20追記:上の計算は$\omega t=\omega_{d}t=\pi$としてしまっていて、
間違いであることを授業中に発見。
正確には、
${\displaystyle DAF_{max}=
1+e^{-\beta\pi/\sqrt{1-\beta^{2}}}
}$
となる。$\beta=0.05$を代入すると、
$DAF_{max}=
1+e^{-0.05\pi/\sqrt{1-0.05^{2}}}=1.8544678930$
となる。四捨五入しても1.854だ。
参考までに
implicit real*8(a-h,o-z)
h=0.05d0
omg=1.d0
dafmax=0.d0
omgd=omg*sqrt(1.d0-h**2)
do i=0, 10000
t=real(i)/100.d0
u=1-exp(-h*omg*t)*(omg/omgd*h*sin(omgd*t)+cos(omgd*t))
print*, t, u
if(u>dafmax) dafmax=u
end do
pi=acos(-1.d0)
print *, "# DAF_max=",dafmax
print *, "# 1+e^{-0.05π/√1-0.05^2}=", 1.d0+exp(-0.05d0*pi/sqrt(1-0.05**2))
end
みたいなプログラム(daf005.f90)を組んで、
$\beta=0.05, \omega=1$とかで回してみると、
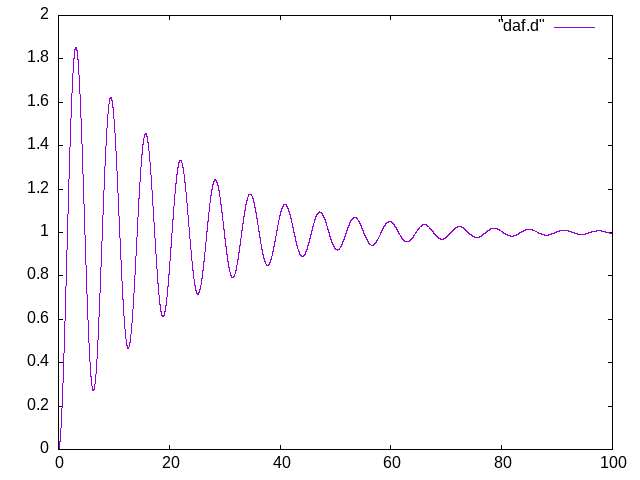
# DAF_max= 1.8544593464018049
# 1+e^{-0.05π/√1-0.05^2}= 1.8544678901484501
となる。
$\omega$の値を大きくした場合は、
t=real(i)/100.
みたいに、時間きざみを細かくしてやらないと、
1.854から少しずれたところが求まる。
